Как собрать ЧПУ станок самостоятельно. Какие компоненты нужны для сборки ЧПУ станка. Как правильно собрать механику ЧПУ станка. Как подключить электронику и настроить управление ЧПУ станком. На что обратить внимание при самостоятельной сборке ЧПУ.
Основные компоненты самодельного ЧПУ станка
Для создания работоспособного ЧПУ станка своими руками потребуются следующие основные компоненты:
- Каркас и рама станка
- Линейные направляющие и подшипники для осей X, Y, Z
- Шаговые двигатели для приводов осей
- Ходовые винты или ремни для передачи движения
- Шпиндель или фрезерный двигатель
- Контроллер управления и драйверы шаговых двигателей
- Концевые выключатели
- Блок питания
Рассмотрим подробнее, как правильно подобрать и собрать эти компоненты для создания надежного и точного ЧПУ станка.
Сборка механической части ЧПУ станка
Механическая часть является основой точности и жесткости станка. При ее сборке важно обратить внимание на следующие моменты:
Каркас и рама станка
Для изготовления каркаса подойдут следующие материалы:
- Алюминиевый профиль
- Стальной профиль
- Фанера толщиной от 18 мм
- МДФ-плиты
Важно обеспечить максимальную жесткость конструкции. Для этого используйте угловые соединения и ребра жесткости. Размеры каркаса определяются требуемой рабочей зоной станка.
Линейные направляющие
Для обеспечения плавного и точного перемещения используются:
- Цилиндрические направляющие с линейными подшипниками
- Рельсовые направляющие с каретками
Диаметр направляющих подбирается исходя из размеров станка и предполагаемых нагрузок. Для небольших станков подойдут направляющие диаметром 12-16 мм.
Ходовые винты
Для преобразования вращения двигателей в линейное перемещение используются:
- Трапецеидальные винты (например, TR8x2)
- Шарико-винтовые пары (ШВП)
ШВП обеспечивают более высокую точность, но стоят дороже. Для хобби-станков часто используют обычные трапецеидальные винты.
Выбор и подключение электроники
Электронная часть отвечает за управление станком. Основные компоненты:
Шаговые двигатели
Для небольших станков подойдут двигатели Nema17 или Nema23. Важные характеристики:
- Крутящий момент (от 40 Н*см)
- Ток обмоток (1.5-3 А)
Драйверы двигателей
Популярные модели:
- TB6560
- DRV8825
- TMC2208
Драйвер должен обеспечивать ток не меньше номинального тока двигателя.
Контроллер управления
Варианты контроллеров:
- Arduino + плата расширения GRBL
- Плата ELEKSMAKER Mana SE
- Контроллер MACH3
Контроллер принимает команды G-кода и управляет работой всего станка.
Настройка программного обеспечения
Для работы со станком потребуется следующее ПО:
- CAD-система для создания 3D-моделей (например, Fusion 360)
- CAM-программа для создания управляющих программ (например, ArtCAM)
- Программа управления станком (например, GRBL Panel или Mach3)
Настройка программ включает калибровку осей, настройку концевых выключателей, задание рабочей зоны станка.
Меры безопасности при работе с ЧПУ станком
При работе с самодельным ЧПУ станком важно соблюдать следующие меры безопасности:
- Используйте защитные очки и наушники
- Не прикасайтесь к движущимся частям во время работы
- Надежно закрепляйте заготовку
- Используйте концевые выключатели для ограничения движения осей
- Обеспечьте хорошую вентиляцию рабочей зоны
Соблюдение этих правил поможет избежать травм и повреждения оборудования.
Типичные ошибки при самостоятельной сборке ЧПУ станка
При создании ЧПУ станка своими руками новички часто допускают следующие ошибки:- Недостаточная жесткость конструкции
- Неправильный подбор мощности двигателей
- Экономия на качестве направляющих и подшипников
- Отсутствие концевых выключателей
- Неправильная настройка программного обеспечения
Чтобы избежать этих проблем, тщательно планируйте конструкцию и не экономьте на ключевых компонентах.
Рекомендации по эксплуатации самодельного ЧПУ станка
Для долгой и надежной работы самодельного ЧПУ станка придерживайтесь следующих рекомендаций:
- Регулярно проверяйте затяжку всех соединений
- Смазывайте направляющие и ходовые винты
- Следите за чистотой рабочей зоны
- Не превышайте рекомендуемые режимы резания
- Периодически калибруйте оси станка
Правильное обслуживание поможет сохранить точность и увеличить срок службы станка.
Перспективы модернизации самодельного ЧПУ станка
После успешной сборки базовой версии станка можно задуматься о его модернизации:
- Установка более мощного шпинделя
- Добавление четвертой оси для 3D-обработки
- Установка системы автоматической смены инструмента
- Добавление датчика высоты инструмента
- Установка системы удаления стружки
Модернизация позволит расширить возможности станка и повысить удобство работы.
ЧПУ станок своими руками. Часть 1. Введение
- Статьи
- Конструирование портальных станков с ЧПУ
КАК РАБОТАЕТ СТАНОК С ЧПУ?
Портальный станок с ЧПУ во многом схож с любыми другими станками с ЧПУ. ЧПУ станок(станок с числовым программным управлением) — это станок , который оснащен специализированным программно-аппаратным обеспечением для управления механической частью. Использование ЧПУ систем делает производство более предсказуемым, увеличивает повторяемость результата механообработки и снижает потребность в рабочих руках высококвалифицированных рабочих-станочников и операторов. Если в случае обычного станка перемещением рабочего инструмента(резца, шпинделя, рабочего стола) или заготовки вручную управляет рабочий-станочник, то в станке ЧПУ вся траектория рассчитывается заранее в специальных программах — CAM-системах, и сохраняется в пригодном к исполнению формате.
Наиболее распространенная конструкция портального станка может перемещаться в 3х направлениях(координатах). Такие станки называются 3-хкоординатными, но с их помощью нельзя выполнить полностью 3-хмерную деталь, так как конструкция не позволяет фрезеровать поднутрения.
КОМПОНОВКА ТИПИЧНОГО ПОРТАЛЬНОГО DIY СТАНКА С ЧПУ
Подавляющая часть портальных станков с ЧПУ имеет весьма схожую структуру.
- Станина.
Станина — скелет станка, его несущая конструкция,в каком-то смысле станина и есть станок. От её правильной проектировки и исполнения(сварки, сборки) зависит самый важный параметр станка — жесткость, а следовательно, и точность обработки станка. Станины портальных станков изготавливаются из разнообразных материалов, однако наибольшее распространение получили станины, изготовленные из алюминиевого конструкционного профиля, фрезерованных алюминиевых деталей и сварные станины из стали(прокат или листовая сталь). Все более набирают обороты также литые станины из полимерных материалов, но задача литья такой станины не под силу начинающим. Подробней вопросы изготовления станины для станка будут освещены в отдельной статье - Рабочий стол.
Рабочий стол — это собственно поверхность, над которой перемещается рабочий инструмент станка (фреза, гравер и т.д.). Стол служит для закрепления обрабатываемой заготовки, и это накладывает определенные требования на его конструктивное исполнение. Стол должен быть достаточно ровным, и обеспечивать возможность закрепить заготовку в любом месте. Основными решениями для этого являются использование стола с Т-пазами(«Т-стол») и вакуумных столов. Стол с Т-пазами позволяет закрепить практически любую заготовку с помощью специальных зажимов. Вакуумные столы прижимают заготовку к себе за счет создания разрежения под сеткой на поверхности, поэтому они способны фиксировать только заготовки с плоской нижней частью(разнообразные листовые материалы), а также они существенно дороже. Однако вакуумные столы позволяют равномерно прижать заготовку по всей её площади, тогда как при фиксации большой плоской заготовки на Т-столе заготовка в центральной своей части может прогнуться вверх, что приведет к снижению соответствия размеров у конечной детали.
Стол должен быть достаточно ровным, и обеспечивать возможность закрепить заготовку в любом месте. Основными решениями для этого являются использование стола с Т-пазами(«Т-стол») и вакуумных столов. Стол с Т-пазами позволяет закрепить практически любую заготовку с помощью специальных зажимов. Вакуумные столы прижимают заготовку к себе за счет создания разрежения под сеткой на поверхности, поэтому они способны фиксировать только заготовки с плоской нижней частью(разнообразные листовые материалы), а также они существенно дороже. Однако вакуумные столы позволяют равномерно прижать заготовку по всей её площади, тогда как при фиксации большой плоской заготовки на Т-столе заготовка в центральной своей части может прогнуться вверх, что приведет к снижению соответствия размеров у конечной детали. - Приводы осей. Двигатели.
Двигатели — связующее звено между электронной частью системы ЧПУ и механической частью, они(точнее, их управляющие модули — драйверы) получают сигналы с контроллера ЧПУ(часто в этой роли выступает персональный компьютер) и преобразуют их во вращательное движения собственного вала. В станках с ЧПУ используются 2 вида двигателей: серводвигатели и шаговые двигатели(а также линейные двигатели — разновидность серводвигателей. Линейные двигатели одновременно являются и трансмиссией для оси). Сказанное далее будет относиться к классическим шаговым и сервоприводам. Шаговые двигатели распространены в самодельных станках с ЧПУ и бюджетных моделях промышленных гравировально-фрезерных станков, а также станков лазерной, плазменной резки и т.п. Причина — в их низкой стоимости и простоте управления. Драйверы шаговых двигателей — достаточно бюджетные устройства, широко представлены на рынке от самых простых моделей до весьма продвинутых цифровых драйверов. Платой за простоту и бюджет становится низкий КПД шаговых двигателей, их низкая удельная мощность, слабая способность к ускорению, высокие вибрации, гул и резонанс, что в сумме сильно влияет на эксплуатационные характеристики станка.
В станках с ЧПУ используются 2 вида двигателей: серводвигатели и шаговые двигатели(а также линейные двигатели — разновидность серводвигателей. Линейные двигатели одновременно являются и трансмиссией для оси). Сказанное далее будет относиться к классическим шаговым и сервоприводам. Шаговые двигатели распространены в самодельных станках с ЧПУ и бюджетных моделях промышленных гравировально-фрезерных станков, а также станков лазерной, плазменной резки и т.п. Причина — в их низкой стоимости и простоте управления. Драйверы шаговых двигателей — достаточно бюджетные устройства, широко представлены на рынке от самых простых моделей до весьма продвинутых цифровых драйверов. Платой за простоту и бюджет становится низкий КПД шаговых двигателей, их низкая удельная мощность, слабая способность к ускорению, высокие вибрации, гул и резонанс, что в сумме сильно влияет на эксплуатационные характеристики станка.
Серводвигатели — двигатели с установленным датчиком угла поворота. Это семейство представлено достаточно широко, существуют щеточные и бесщеточные двигатели, постоянного и переменного тока. В целом про серводвигатели можно скзаать, что их отличает высокая плавность хода, высокий КПД, способность переносить кратковременные перегрузки. Однако управление серводвигателем гораздо сложнее, серводрайверы — устройства существенно более дорогие и сложны в настройке(см. статью о выборе привода для фрезерного станка с ЧПУ). Существует также бюджетные варианты щеточных серводвигателей, однако из-за наличия изнашивающейся части(щеток) они менее предпочтительны, чем бесщеточные.
В целом про серводвигатели можно скзаать, что их отличает высокая плавность хода, высокий КПД, способность переносить кратковременные перегрузки. Однако управление серводвигателем гораздо сложнее, серводрайверы — устройства существенно более дорогие и сложны в настройке(см. статью о выборе привода для фрезерного станка с ЧПУ). Существует также бюджетные варианты щеточных серводвигателей, однако из-за наличия изнашивающейся части(щеток) они менее предпочтительны, чем бесщеточные. - Приводы осей. Драйверы двигателей.
Блоки управления двигателями отличаются разным набором функций, а также разными электротехническими характеристиками. И если к серводвигателям блок как правило поставляется в паре, то шаговые моторы идут обычно без драйверов, а попробовав самостоятельно подобрать что-либо, можно очень надолго задержаться на этом этапе, так как предложений на рынке очень много. См. также: Как выбрать драйвер для шагового двигателя. - Передачи осей.
Задача трансмиссии, или передачи, — превратить вращательное движение вала двигателя в поступательное перемещение по данной оси. Как правило, передача реализуется одним из 3 способов: передача винт-гайка, ШВП или зубчатая передача (шестерня-рейка или шкив-ремень). Как выбать передачу для осей — тема отдельной статьи. Здесь достаточно указать на то, что передача вместе с видом двигателя(и его управления) определяет скорость перемещения по оси, разрешение задания позиции, а также влияет на точность. Каждый вид передачи изготавливается с определенной точностью. С помощью указанного производителем класса точности для данного элемента трансмиссии можно определить, какая погрешность будет вноситься им в работу станка.
Как правило, передача реализуется одним из 3 способов: передача винт-гайка, ШВП или зубчатая передача (шестерня-рейка или шкив-ремень). Как выбать передачу для осей — тема отдельной статьи. Здесь достаточно указать на то, что передача вместе с видом двигателя(и его управления) определяет скорость перемещения по оси, разрешение задания позиции, а также влияет на точность. Каждый вид передачи изготавливается с определенной точностью. С помощью указанного производителем класса точности для данного элемента трансмиссии можно определить, какая погрешность будет вноситься им в работу станка. - Направляющие.
Направляющие обеспечивают перемещение рабочего узла станка строго по заданной траектории. Качество самих направляющих и, что очень важно, качество их установки на станину — второй по важности фактор(после станины), определяющий точность вашего станка. К выбору направляющих стоит подойти очень ответственно. - Шпиндель.
Вообще говоря, вместо шпинделя может быть установлен другой узел — лазерный гравер, установка плазменной или лазерной резки, экструдер. Мы рассмотрим шпиндель, как наиболее нагруженный узел. Шпиндель — как правило, это электродвигатель, особенностью которого является низкое биение вала и возможность регулировать скорость вращения в достаточно широких пределах. Вал шпинделя оканчивается конусом, в который устанавливается зажимная цанга, которая держит режущий инструмент — фрезу или гравер. Ключевыми характеристиками шпинделя являются: биение вала(как правило, измеряется биение на конусе) и мощность шпинделя(указывается в ваттах). Большинство шпинделей предназначены для обработки дерева, пластика, камня, металлообработки. Скорость вращения варьируется обычно от 6000 до 30000 оборотов в минуту. Для фрезеровки и гравировки металлов используются мощные шпиндели с низкими оборотами(2000-10000 об/мин). Многие портальные станки, предназначенные для обработки дерева и пластика, могут гравировать металлы, и даже иногда фрезеровать цветные металлы, однако в этом случае станок испытывает сильную вибрацию из-за отдачи на фрезу, которая не может быть погашена легкой станиной, и это резко снижает качество обработки и ресурс станка.
Мы рассмотрим шпиндель, как наиболее нагруженный узел. Шпиндель — как правило, это электродвигатель, особенностью которого является низкое биение вала и возможность регулировать скорость вращения в достаточно широких пределах. Вал шпинделя оканчивается конусом, в который устанавливается зажимная цанга, которая держит режущий инструмент — фрезу или гравер. Ключевыми характеристиками шпинделя являются: биение вала(как правило, измеряется биение на конусе) и мощность шпинделя(указывается в ваттах). Большинство шпинделей предназначены для обработки дерева, пластика, камня, металлообработки. Скорость вращения варьируется обычно от 6000 до 30000 оборотов в минуту. Для фрезеровки и гравировки металлов используются мощные шпиндели с низкими оборотами(2000-10000 об/мин). Многие портальные станки, предназначенные для обработки дерева и пластика, могут гравировать металлы, и даже иногда фрезеровать цветные металлы, однако в этом случае станок испытывает сильную вибрацию из-за отдачи на фрезу, которая не может быть погашена легкой станиной, и это резко снижает качество обработки и ресурс станка.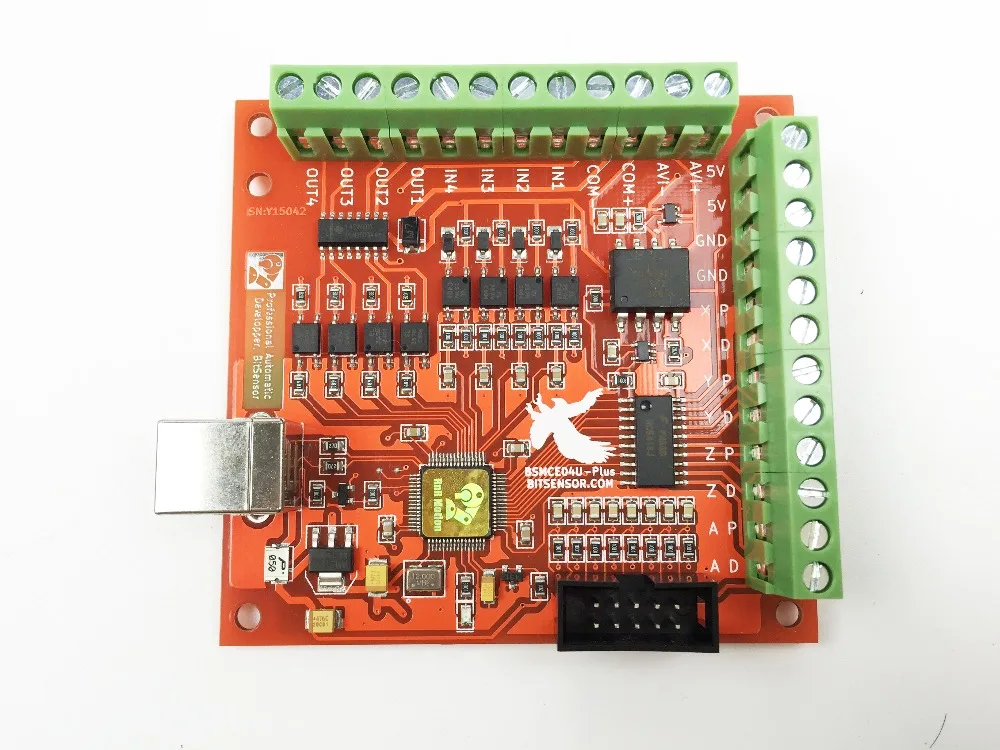 Фрезеровка и гравировка металлов и некоторых видов пластика требует охлаждения режущего инструмента. В настоящее время существует множество способов охлаждения рабочей области, но основным остается подача смазывающе-охлаждающей жидкости на фрезу. Некоторые шпиндели, управляемые инвертором, позволяют контролировать скорость вращения из системы ЧПУ, путем подачи на вход инвертора(частотного преобразователя) аналогового сигнала 0..+10 В.
Фрезеровка и гравировка металлов и некоторых видов пластика требует охлаждения режущего инструмента. В настоящее время существует множество способов охлаждения рабочей области, но основным остается подача смазывающе-охлаждающей жидкости на фрезу. Некоторые шпиндели, управляемые инвертором, позволяют контролировать скорость вращения из системы ЧПУ, путем подачи на вход инвертора(частотного преобразователя) аналогового сигнала 0..+10 В.
Электроника для ЧПУ своими руками — Самодельные проекты
Думаю, что нам всем стоит друг у друга поучиться
Вот только без обид — я не думаю, что мог бы чему-то научиться у «разработчика», который в самодельной интерфейсной плате развязывает STEP и DIR тормознутыми оптопарами PC817. Про более быстрые (на порядок) оптроны (6N135..137 и их аналоги) с несущественно большей ценой вам не доводилось слышать? PC817, TLP521 и т.п. по своему быстродействию годятся разве что на развязку концевых выключателей. ..
..
И к чему было выражение глубокого презрения к тем, кто купил готовые платы и драйверы на Алиэкспрессе и «соединил их проводками», а не изготовил и спаял печатные платы «с нуля» своими руками? Не вижу никакого подвига в столь примитивных разработках, разве что почесать зудящее «Чувство Собственного Величия»… По деньгам экономии не выходит — те же TB6600 и детали их «обвязки» по розничным ценам примерно равны цене готового китайского драйвера. Развести простенькую плату, изготовить ее, набить деталями и спаять — тоже достижение, которым может гордиться только школьник из радиокружка в «дворце пионеров».
К чему весь этот пафос, сильно попахивающий тем, что «создадим себе на пустом месте трудности и будем доблестно их преодолевать», если в конечном итоге у вас получается самоделка на заведомо устаревшем уровне? Все адекватные самодельщики давно уже не стремятся изготовить электронику своими руками (в готовом виде есть любая электроника, от 3-канальных «красных плат» на TB6560 или TB6600 с опторазвязкой, до плат «Mesa» и автономных контроллеров движения) и сосредоточились на создании хорошей механики станка.
Если что, паять умею. Самодельные платы изготавливал много-много раз — и рисованием вручную, и «лазерным утюгом», и фоторезистом. Нарисовать схему и развести плату в PCAD2000 или в Eagle тоже смогу, просто придется потратить день-два, чтобы вспомнить полузабытые навыки работы в них. Софт для микроконтроллеров — сейчас похвастаться нечем, но в свое время для PIC’ов писал всякую фигню… Программирование Arduino осваивать лень, не усматриваю её полезных практических применений в своей повседневной деятельности. Чему ещё предлагаете в этом направлении поучиться?
Сообщение отредактировал T-Rex: 25 Февраль 2018 — 03:04
Чпу станок своими руками. Инструкция по сборке станка Моделист3030 образца 2015г
Расположение осей X, Y, Z настольного фрезерно-гравировального станка ЧПУ :
Ось Z перемещает инструмент(фрезер) по вертикали(вниз-вверх)
Ось Х — перемещает каретку Z в поперечном направлении(влево-вправо).
Ось Y — перемещает подвижный стол(вперед-назад).
С устройством фрезно-гравировального станка можно ознакомиться выбор и устройство фрезерно-гравировального станка
Состав набора ЧПУ станка Моделист2020 и Моделист3030
I Набор фрезерованных деталей из фанеры 12мм для самостоятельной сборки
Комплект фрезерованных деталей для сборки станка с ЧПУ с подвижным столом состоит из:
1) Стойки портала фрезерного станка с ЧПУ
2) набор фрезерованных деталей станка ЧПУ для сборки оси Z
3) набор фрезерованных деталей станка ЧПУ для сборки подвижного стола
4) набор фрезерованных деталей станка ЧПУ для сборки опор шаговых двигателей и крепления шпинделя
II Набор механики фрезерного станка включает:
1. муфта для соединения вала шагового двигателя с ходовым винтом станка — (3шт. ). Размер соединительной муфты для станка Моделист2030 с шаговыми двигателями NEMA17 — 5х5мм. Для станка Моделист3030 с шаговыми двигателями Nema23 — 6,35×8мм
). Размер соединительной муфты для станка Моделист2030 с шаговыми двигателями NEMA17 — 5х5мм. Для станка Моделист3030 с шаговыми двигателями Nema23 — 6,35×8мм
2. стальные направляющие линейного перемещения для ЧПУ станка Моделист3030:
— 16мм (4шт.) для осей Х и Y,
— 12мм(2шт) для оси Z
Для ЧПУ станка Моделист2020 диаметр направляющих линейного перемещения:
— 12мм(8шт) для осей Х, Y и Z.
3. линейные подшипники качения для фрезерного станка Моделист3030:
— линейные подшипники LM16UU (8шт.) для осей Х и Y,
— линейные подшипники LM12UU для оси Z.
Для фрезерного ЧПУ станка Моделист2020
— линейные подшипники LM12UU (12шт.) для осей Х, Y и Z.
4. ходовые винты для фрезерного станка Моделист2020 — М12 (шаг 1,75мм) — (3шт.) c обработкой под d=5мм с одного конца и под d=8мм с другого.
Для фрезерного станка Моделист3030 — трапецеидальные винты TR12x3 (шаг 3мм) — (3шт.) c обработкой концов под d=8мм.
5. радиальные подшипники крепления ходовых винтов -(4шт. ) один подшипник в алюминиевом блоке для оси Z.
) один подшипник в алюминиевом блоке для оси Z.
6. ходовые гайки из графитонаполненного капролона для осей X, Y и Z (- 3шт.)
7. крепеж
III Набор электроники фрезерного станка с ЧПУ:
1. Для станка с ЧПУ Моделист2020: шаговые двигатели NEMA17 17HS8401 (размер 42х48мм, крутящий момент 52N.cm, ток 1,8А, сопротивление фазы 1,8Ом, индуктивность 3,2mH, диаметр вала 5мм) — 3шт.
Для станка с ЧПУ Моделист3030: шаговые двигатели 23HS5630 (размер 57х56мм, крутящий момент 12,6кг*см, ток 3,0А, сопротивление фазы 0,8Ом, индуктивность 2,4mH, диаметр вала 6,35мм) — 3шт.
2. контроллер шаговых двигателей ЧПУ станка на специализированных микрошаговых драйверах компании Toshiba ТВ6560 в закрытом алюминиевом корпусе
3. блок питания 24 В 6,5 A для ЧПУ станка Моделист2020 и 24В 10,5А для ЧПУ станка Моделист3030
4. комплект подсоединительных проводов
Последовательность сборки фрезерного станка чпу с подвижным столом.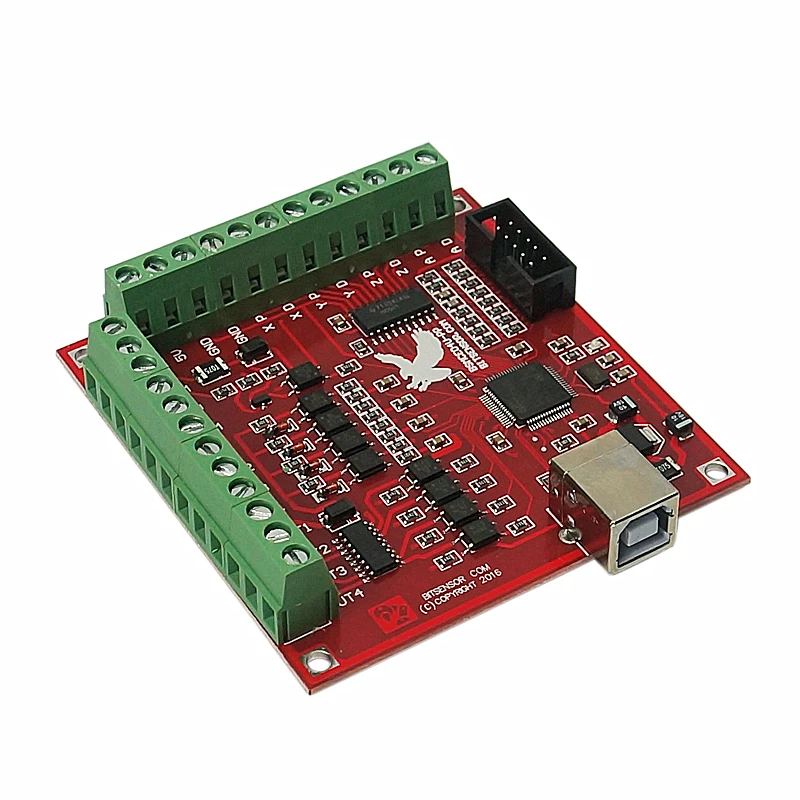
Система линейного перемещения любого станка состоит из двух деталей: шариковая втулка — это элемент который движется и неподвижного элемента системы — линейная направляющая или вал(линейная опора). Линейные подшипники могут быть разных видов: втулка, разрезная втулка, втулка в алюминиевом корпусе для удобства крепления, шариковая каретка, роликовая каретка, основная функция которых — нести нагрузку, обеспечивая стабильное и точное перемещение. Применение линейных подшипников(трение качения) вместо втулок скольжения позволяет значительно снизить трение и использовать всю мощность шаговых двигателей на полезную работу резки.
Рисунок 1
1 Смазать линейные подшипники системы линейного перемещения фрезерного станка специальной смазкой (можно использовать Литол-24(продается в магазинах авто запчастей)).
2 Сборка оси Z фрезерного станка с ЧПУ.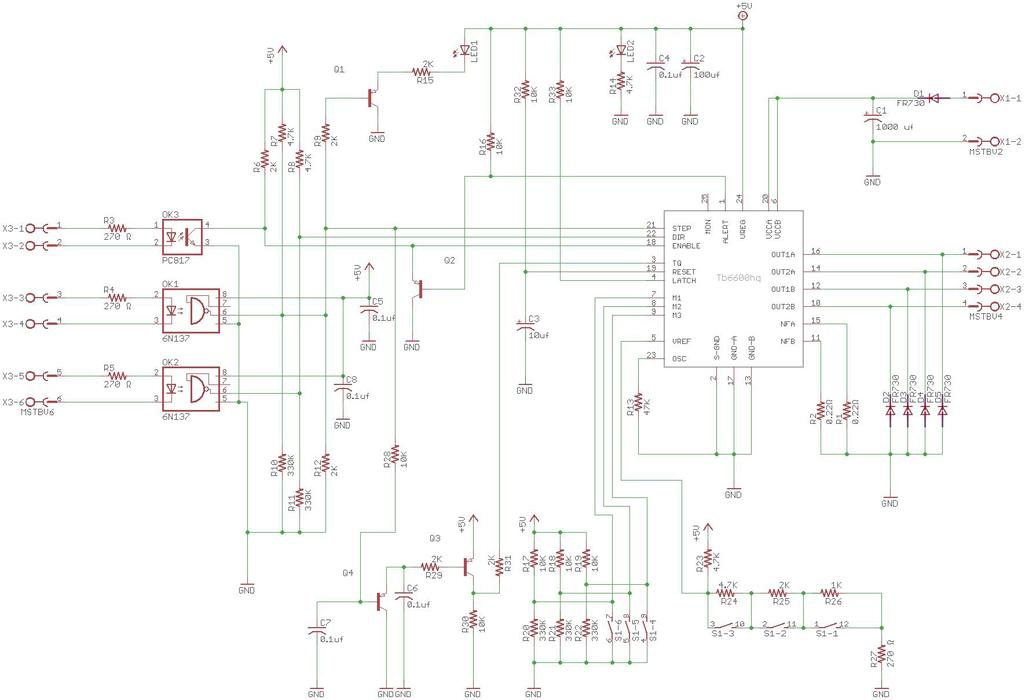
Сборка оси Z описана в инструкции «Инструкция по сборке каретки Z»
3 Сборка стола фрезерного ЧПУ станка, ось Y
3.1 Детали для сборки портала, рисунок 2.
1) комплект фрезерованных деталей
2) стальные направляющие линейного перемещения диаметром 16мм(2шт)
3) линейный подшипник LM16UU(4шт)
4) ходовые винты для фрезерного станка Моделист2030 — М12 (шаг 1,75мм) c обработкой концов под d=8мм и d=5мм
Для фрезерного станка Моделист3030 — трапецеидальные винты TR12x3 (шаг 3мм) c обработкой концов под d=8мм.
5. радиальные подшипники крепления ходовых винтов -(2шт.)
6. ходовая гайка из графитонаполненного капролона — (- 1шт.)
7. крепеж
Рисунок 2. Детали портала фрезерного настольного ЧПУ станка
3.2 Запрессовать линейные подшипники и вставить держатели линейных подшипников во фрезерованные пазы, рисунок 2. Вставить линейные направляющие в линейные шарикоподшипники.
Вставить линейные направляющие в линейные шарикоподшипники.
Рисунок 2 Сборка стола настольного фрезерного ЧПУ станка
3.3 Держатели подшипников линейного перемещения забиваются в пазы детали подвижного стола. Соединение типа шип-паз обеспечивает отличную жесткость узла, все детали этого узла изготовлены из фанеры 18мм. Дополнительно стянув детали болтовым соединением обеспечим долгий и надежный срок службы, для этого через уже имеющееся отверстие в пластине, которое служит направляющим для хода сверла, сверлим отверстие в торце держателя линейных подшипников, как показано на рисунке 3, сверло диаметром 4мм.
Рисунок 3 Сверление крепежных отверстий.
3.4 Накладываем сам стол и, через уже имеющиеся отверстия скрепляем, с помощью винтов М4х55 из комплекта, рисунок 4 и 5.
Рисунок 4. Крепление подшипников подвижного стола.
Рисунок 5. Крепление подшипников подвижного стола.
3.5 Запрессовать упорные подшипники в детали каркаса стола. Вставить ходовой винт с ходовой гайкой из графитонаполненного капролона, в опорные подшипники, и линейные направляющие в пазы элементов каркаса, рисунок 6.
Рисунок 6. Сборка подвижного стола.
Скрепить элементы каркаса шурупами из комплекта. Для крепления с боков используйте шурупы 3х25мм, рисунок 7. Перед вкручиванием шурупов, обязательно засверлите сверлом диаметром 2мм, для избежания расслаивания фанеры.
Если ходовой винт не зажат деталями основания подвижного стола и имеется люфт винта вдоль оси в опорных подшипниках — используйте шайбу диаметром 8мм, рисунок 6.
Рисунок 7. Сборка каркаса настольного станка.
3. 6 Расположите ходовую гайку по центру между линейными подшипниками и сделайте отверстия для шурупов сверлом 2мм, рисунок 8, после чего шурупами 3х20 из комплекта закрепить ходовую гайку. При сверлении обязательно использовать упор под ходовой гайкой, чтобы не погнуть ходовой винт.
6 Расположите ходовую гайку по центру между линейными подшипниками и сделайте отверстия для шурупов сверлом 2мм, рисунок 8, после чего шурупами 3х20 из комплекта закрепить ходовую гайку. При сверлении обязательно использовать упор под ходовой гайкой, чтобы не погнуть ходовой винт.
Рисунок 8. Крепление ходовой гайки.
4 Сборка портала станка.
Для сборки понадобятся:
1) комплект фрезерованных деталей для сборки подвижного стола
2) стальные направляющие линейного перемещения диаметром 16мм(2шт)
3) линейный подшипник LM16UU(4шт)
4) ходовые винты для фрезерного станка Моделист2030 — М12 (шаг 1,75мм) c обработкой концов под d=8мм и d=5мм.
Для фрезерного станка Моделист3030 — трапецеидальные винты TR12x3 (шаг 3мм) c обработкой концов под d=8мм.
5. радиальные подшипники крепления ходовых винтов -(2шт.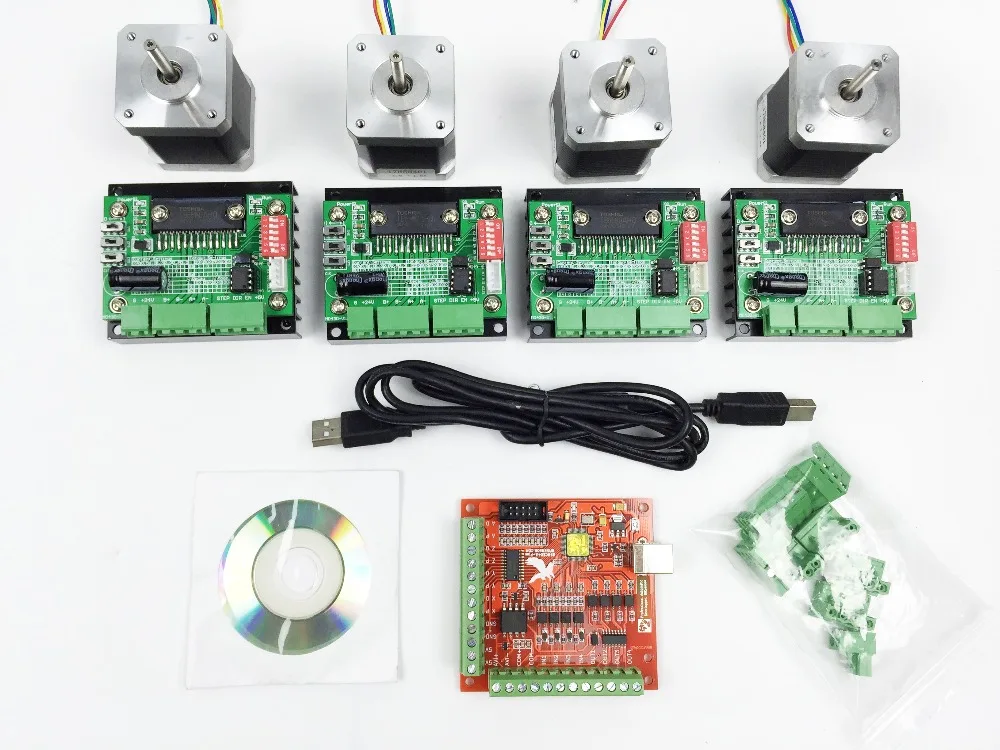 )
)
6. ходовая гайка из графитонаполненного капролона — (- 1шт.)
7. крепеж
4.1 Закрепить боковину портала, рисунок 9.
Рисунок 9. Сборка портала станка.
4.2 Вставить ходовой винт с гайкой в каркас каретки оси Z, рисунок 10.
Рисунок 10. Установка ходового винта.
4.3 Вставить линейные направляющие, рисунок 11.
Рисунок 19 Крепление ходового винта «в распор».
4.4 Закрепить вторую боковину портала, рисунок 11.
Рисунок 11. Установка второй боковины портала
Если ходовой винт не зажат деталями основания подвижного стола и имеется люфт вдоль оси — используйте шайбу диаметром 8мм.
4.5 Установить и закрепить заднюю стенку каретки Z, Рисунок 12.
Рисунок 12. Крепление задней стенки каретки Z.
4.6 Закрепить капролоновую ходовую гайку шурупами 3х20 из комплекта, рисунок 13.
Рисунок 13. Крепление ходовой гайки оси X.
4.7 Закрепить заднюю стенку портала, рисунок 14, с использованием шурупов 3х25 из комплекта.
Рисунок 14. Крепление задней стенки портала.
5 Установка шаговых двигателей.
Для установки шаговых двигателей используйте детали крепления из набора фрезерованных деталей станка ЧПУ для сборки опор шаговых двигателей Nema23 для фрезерного станка Моделист3030.
Рисунок 15. Установка шаговых двигателей.
Установить муфты 5х8мм для соединения вала двигателя с ходовым винтом. Закрепить шаговые двигатели на станок, для крепления используйте винт М4х55 из комплекта, рисунок 15.
6 Закрепите контроллер на задней стенке фрезерно-гравировального станка, и подключите к нему клеммники моторов.
7 Установка фрезера.
Крепление фрезера осуществляется за шейку инструмента или корпус. Стандартный диаметр шейки бытовых фрезеров 43мм. Диаметр шпинделя 300Вт — 52мм, крепление за корпус. Для установки соберите крепление фрезера, детали крепления на рисунке 16. Используйте шуруп 3х30мм из комплекта.
Рисунок 16 Крепление шпинделя 43мм
Рисунок 17 Шпиндель с креплением на ЧПУ станок
При установке дремель подобных инструментов(граверов), кроме этого потребуется дополнительное крепление корпуса гравера к каретке Z хомутом, рисунок 18.
Рисунок 18 Крепление гравера на фрезерный станок.
Имеется возможность установка насадки для подключения пылесоса
Магазин чпу станков хобби класса
ЧПУ фрезерный станок с автономным контроллером на STM32 « Web art guru
Так как я издавна собрал для себя ЧПУ станок и издавна и часто эксплуатирую его для хоббийных целей, то мой опыт, надеюсь, будет полезен , как и начальные коды контроллера.
Постарался написать лишь те моменты, которые лично мне показались необходимыми.
www.cnczone.ru/forums/index.php?showtopic=3334
Ссылка на исходники контроллера и настроенную оболочку Eclipse+gcc и пр. лежат там же где ролик:
История сотворения
Часто сталкиваясь, с необходимостью сделать ту либо иную маленькую «штучку» сложной формы, сначало задумался о 3D принтере. И даже начал его делать…
Но почитал форумы, и оценив скорость работы 3D принтера, качество и точность результата, процент брака и конструкционные характеристики термопластмассы, сообразил, то это не наиболее чем игрушка.
Собирал из всякой фигни, что была под рукою, так как хотелось побыстрее (профиль + шпильки). Заказ на комплектующие из Китая пришел за месяц. И уже через 2 недельки станок работал с управлением от LinuxCNC.
Так что конструкция осталась без конфигураций. Собирался позже переработать, но, как оказалось, станок вышел довольно твердый, и гайки на шпильках не пришлось подтягивать ни разу.
Исходная эксплуатация станка показала что:
Перегревается и жутко громко работает. Применять в качестве шпинделя бормашинку “china noname” на 220V не наилучшая мысль. Боковой люфт фрезы (подшипников?) чувствуется руками.
Но перегревается и выключатся через 5 минут. Люфт не ощутим. Бормашинка Proxon работает тихо.
Комп, взятый на время, с LPT двунаправленным портом — не комфортен. И вообщем.. Занимает место. Взят на время (отыскать PCI-LPT оказалось неувязкой).
Опосля начальной эксплуатации заказал шпиндель с водяным остыванием и решил сделать контроллер для автономной работы на самом дешевеньком варианте STM32F103, продаваемом в комплекте с 320×240 LCD экраном.
Почему люд до сих пор упрямо истязает 8-и разрядные ATMega для относительно сложных задач, да еще через Arduino для меня загадка. Наверняка обожают трудности.
Разработка контроллера
Но ни те, ни те исходники расчета линии движения не взял. Програмку создавал опосля вдумчивого просмотра исходников LinuxCNC и gbrl. Захотелось испытать написать модуль расчета без использования float. Только на 32-х разрядной математике.
Захотелось испытать написать модуль расчета без использования float. Только на 32-х разрядной математике.
Итог меня устраивает для всех режимов эксплуатации и прошивку не трогал уже издавна.
режим 1/8). Скорость наибольшая, подобранная экспериментально: X:2000мм/мин Y:1600 Z:700 (1600 step/mm.
Но ограничена не ресурсами контроллера. Просто выше уже отвратительный звук пропуска шагов даже прямых участках по воздуху. Экономная китайская плата управления шаговиками на TB6560 не самый наилучший вариант.
Растет возможность поломки фрезы. Практически скорость по дереву (бук, 5мм заглубления,d=1мм фреза, шаг 0.15мм) больше 1200 мм не ставлю.
В итоге вышел контроллер со последующим функционалом:
Работа с файлами обычного формата G-code Подключение к наружному компютеру как обычное usb mass storage device (FAT16 на SD карте).
Удаление файлов через пользовательский интерфейс контроллера.
Просмотр линии движения по избранному файлу (как дозволяет экран 640×320) и расчет времени выполнения. Практически эмуляция выполнения с суммированием времени.
Практически эмуляция выполнения с суммированием времени.
Просмотр содержимого файлов в тестовом виде.
Режим ручного управления с клавиатуры (перемещение и выставления «0»).
Пуск выполнения задания по избранному файлу (G-code).
Приостанов/продолжить выполнение. (время от времени полезно).
Аварийный программный стоп.
Т.е. Контроллер подключатся к плате управления шаговиками через тот же разъем LPT. он выполняет роль управляющего компа с LinuxCNC/Mach4 и взаимозаменяем с ним.
Как раз на e-bay отыскал относительно дешевенькие оптически экодеры (1/512), шаг деления которых для моих ШВП был 5/512= 0.0098мм. Опосля творческих тестов по вырезанию своими руками нарисованных рельефов на дереве, и тестов с опциями ускорений в програмке, захотел дополнительно еще и энкодеры на осях.
Ни обработка по прерыванию, ни, тем наиболее, программный опрос никогда не управятся с «дребезгом» (это говорю для любителей ATMega). Кстати, внедрение оптических энкодеров высочайшего разрешения, без аппаратной схемы работы с ними (в STM32 она есть) – бессмысленно.
В первую очередь, я желал для последующих задач:
Ручное размещение на столе с высочайшей точностью.
Контроль пропуска шагов с контролем отклонение линии движения от расчетной.
Но, отыскал им еще одно применение, пусть и в достаточно узенькой задачке.
Внедрение энкодеров для корректировки линии движения станка с шаговыми движками
Увидел, что при вырезании рельефа, при задании ускорения по Z больше определенной величины, ось Z начинает медлительно, но уверенно ползти вниз. По окончанию вырезания рельефа 17×20 см с шагом 0.1мм фреза может уйти вниз на 1-2 мм от расчетной линии движения. Но, время вырезания рельефа при этом ускорении на 20% меньше.
Анализ ситуации в динамике по энкодерам, показал, что при подъеме фрезы время от времени пропадает 1-2 шага.
Обычный метод корректировки шагов с внедрением энкодера дает отклонение не наиболее 0.03 мм и дозволяет уменьшить время обработки на 20%. А даже 0.1 мм выступ на дереве увидеть трудно.
Конструкция
И до сих пор мне этого хватает. Безупречным вариантом для хоббийных целей посчитал настольный вариант с полем чуток больше чем A4.
Безупречным вариантом для хоббийных целей посчитал настольный вариант с полем чуток больше чем A4.
Подвижный стол
Единственное ее преимущество – возможность обработать по частям чрезвычайно длинноватую доску либо, раз приходится часто обрабатывать материал вес которого больше веса портала. Для меня до сих пор остается загадкой, почему все выбирают для настольных станков конструкцию с подвижным порталом.
За все время эксплуатации ни разу не было необходимость выпилить по частям рельеф на 3-х метровой доске либо сделать гравировку на каменной плите.
Подвижный стол владеет последующими преимуществами для настольных станков:
Конструкция проще и, в общем случае, конструкция наиболее твердая.
На неподвижный портал навешиваются все потроха (блоки питания, платы и пр.) и станок выходит компактнее и удобнее для переноски.
Масса стола и кусочка обычного материала для обработки значительно ниже чем масса портала и шпинделя.
Фактически исчезает неувязка с кабелями и шлангами водяного остывания шпинделя.
Шпиндель
Желал бы увидеть, что данный станок не для силовой обработки. ЧПУ станок для силовой обработки проще всего сделать на базе обыденного фрезерного станка.
На мой взор, станок для силовой обработки сплава и станок с высоко оборотистым шпинделем для обработки дерева/пластмасс — это совсем различные типы оборудования.
Сделать в домашних условия всепригодный станок как минимум не имеет смысла.
Это высоко оборотистый шпиндель. Выбор шпинделя для станка с данным типом ШВП и направляющими с линейными подшипниками однозначен.
Для обычного высоко оборотистого шпинделя (20000 о/мин) фрезеровка цветных металлов (про сталь даже речи не идет) – это экстремальный режим для шпинделя. Ну, разве что чрезвычайно нужно и тогда съем по 0.3 мм за проход с поливом ОЖ.
Шпиндель для станка рекомендовал бы с водяным остыванием. С ним слышно во время работы лишь «пение» шаговых движков и бульканье аквариумного насоса в контуре остывания.
Что можно сделать на таком станке
Хоть какой формы корпус фрезеруется из «оргстекла» и по совершенно по гладким срезам склеивается растворителем. В первую очередь у меня ушла неувязка корпусов.
В первую очередь у меня ушла неувязка корпусов.
Шестерни из текстолита непревзойденно вырезаются с честным эвольвентным профилем. Стеклотекстолит отказался всепригодным материалом. Точность станка дозволяет вырезать посадочное место под подшипник, в которое он прохладный зайдет, как положено с легким натягом, а опосля уже не вынуть.
Обработка дерева (рельефы и пр.) – широкий простор для реализации собственных творческих порывов либо, как минимум, для реализации чужих порывов (готовые модели).
Вот лишь ювелирку не пробовал. habrahabr.ru Хотя брусок ювелирного воска ожидает собственного часа. Негде опоки прокаливать/плавить/лить.
Самодельный станок с ЧПУ | Поиск
Подключение драйвера ШД на L298N к Ардуино, шаговому двигателю и БП
Подключение драйвера ШД на L298N к Ардуино, шаговому двигателю и БП
Получив множество писем с просьбами о рассмотрении возможности подключения к разрабатываемому станку простейшего драйвера ШД на L298N для биполярных двигателей, я купил на aliexpress.
Подключение драйвера ШД на TB6560 к Ардуино, шаговому двигателю и БП
Подключение драйвера ШД на TB6560 к Ардуино, шаговому двигателю и БП
Разобравшись с драйверами ШД DM420, я понял, что они обладают не сбалансированным набором возможностей.
Изготовление каретки винтовой передачи для станка с ЧПУ на Ардуино
Изготовление каретки винтовой передачи скольжения станка с ЧПУ
В качестви гаек скольжения в винтовой передаче простого станка с ЧПУ используются обычные гайки М6, закреплённые на подвижной платформе.
Самодельный источник питаний ШД для станка с ЧПУ на Ардуино
Изготовление источника питания из старых зарядников для телефонов
С источником питания для шаговых двигателей можно особо не заморачиваться и купить обычный блок питания для персонального компьютера.
Самодельная муфта соединения ШД и оси для станка с ЧПУ на Ардуино
Муфта соединения оси шагового двигателя и оси винтовой передачи
Для передачи крутящего момента от шагового двигателя оси винтовой передачи станка ЧПУ можно использовать гибкую муфту .
Контакты разработчиков ПО для самодельного станка с ЧПУ
Контакты
Внимание! Я не занимаюсь куплей-продажей составляющих станков с ЧПУ.
Где купить комплектующие для самодельного станка с ЧПУ
Где и как купить детали для изготовления простого станка с ЧПУ
В этом разделе описано, где можно приобрести комплектующие для дешёвого станка с ЧПУ.
Прошивка для Ардуино (дрйверы DM420A, TB6560A) для гравировки фотографий на ЧПУ на Ардуино
Прошивка Ардуино для станка с ЧПУ, драйверы DM420A, двигатели 17HS3404N
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , EasyDriver , A4988 , драйверы с управлением DIR/PUL ( CW/CLK , DIR/STEP )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: лазерная гравировка / выжигание , фотографии, картины
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино для гравировки и резки орнаментов и силуэтов на ЧПУ Ардуино CO2-лазером
Прошивка Ардуино для станка с ЧПУ, драйверы DM420A, двигатели 17HS3404N
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , EasyDriver , A4988 , драйверы с управлением DIR/PUL ( CW/CLK , DIR/STEP )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: выжигание и резка орнаментов и силуэтов с помощью CO2-лазера
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино для интерполяции дуги
Прошивка Ардуино для станка с ЧПУ, драйверы DM420A, двигатели 17HS3404N
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , драйверы с управлением DIR/PUL ( CW/CLK )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: пример интерполяции дуги
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка Ардуино для лазерной гравировки и резки силуэтов и орнаментов твердотельником
Прошивка Ардуино для станка с ЧПУ для лазерной гравировки и резки силуэтов и орнаментов твердотельным лазером
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , EasyDriver , A4988 , драйверы с управлением DIR/PUL ( CW/CLK , DIR/STEP )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: лазерная гравировка / выжигание силуэтов и орнаментов
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино (дрйверы DM420A, TB6560A) для 3D-сканирования на ЧПУ на Ардуино
Прошивка Ардуино для станка с ЧПУ, драйверы DM420A, двигатели 17HS3404N
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , EasyDriver , A4988 , драйверы с управлением DIR/PUL ( CW/CLK , DIR/STEP )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: 3D-сканирование
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино (дрйверы DM420A, TB6560A) для фрезеровки на ЧПУ на Ардуино
Прошивка Ардуино для станка с ЧПУ, драйверы DM420A, двигатели 17HS3404N
Краткое описание
Контроллер: Ардуино
Драйверы ШД: DM420A , TB6560A , EasyDriver , A4988 , драйверы с управлением DIR/PUL ( CW/CLK , DIR/STEP )
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: рисование , фрезерование 2D , фрезерование 3D
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка Ардуино для фрезеровки, Драйверы L298N, 4 контакта
Прошивка Ардуино для станка с ЧПУ, драйверы на L298N, биполярные шаговые двигатели
Краткое описание
Контроллер: Ардуино
Драйверы ШД: L298N
Шаговые двигатели: биполярные
Назначение: рисование , фрезерование 2D , фрезерование 3D
Схема подключения: здесь
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка Ардуино для лазерной гравировки силуэтов, Драйверы L298N, 4 контакта
Прошивка Ардуино для станка с ЧПУ, драйверы L298N, биполярные двигатели
Краткое описание
Контроллер: Ардуино
Драйверы ШД: L298N , двойной мост (double bridge)
Шаговые двигатели: 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: лазерная гравировка / выжигание силуэтов и орнаментов
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино (дрйвер L298N) для гравировки фотографий на ЧПУ на Ардуино
Прошивка Ардуино для станка с ЧПУ, драйверы L298N, биполярные двигатели
Краткое описание
Контроллер: Ардуино
Драйверы ШД: L298N , драйверы с четырехконтактным управлением (двойной мост)
Шаговые двигатели: биполярные, 17HS3404N , 17HS2408 , 42HS40 , двигатели в корпусе Nema
Назначение: лазерная гравировка / выжигание , фотографии, картины
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино (дрйверы ШД ULN2003) для лазерной гравировки на ЧПУ на Ардуино
Прошивка Ардуино для станка с ЧПУ, драйверы ULN2003, двигатели 28BYJ-48-5V
Краткое описание
Контроллер: Ардуино
Драйверы ШД: ULN2003
Шаговые двигатели: 28BYJ-48-5V
Назначение: лазерная гравировка / выжигание
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Прошивка для Ардуино (дрйверы ШД ULN2003) для для фрезеровки 2D, 3D на ЧПУ
Прошивка Ардуино для станка с ЧПУ, драйверы ULN2003, двигатели 28BYJ-48-5V
Краткое описание
Контроллер: Ардуино
Драйверы ШД: ULN2003
Шаговые двигатели: 28BYJ-48-5V
Назначение: рисование , фрезерование 2D , фрезерование 3D
Подробное описание
Прошивка для платы Ардуино написана на языке Processing в среде разработки Arduino 1.
Скачать прошивку для Ардуино ЧПУ, выбор прошивки Arduino
Прошивка Ардуино для станка с ЧПУ
Скачать исходный код прошивки для Ардуино
Ниже представлен список прошивок Ардуино для различных конфигураций станка с ЧПУ.
Скачать прошивку для Ардуино ЧПУ, установка прошивки Arduino
Прошивка Ардуино для станка с ЧПУ
Здесь можно скачать прошивку для ЧПУ на Ардуино.
On-line генерация G-кода по растровому изображению
Интернет-сервис формирования
On-line генерация G-кода по растровому изображению
Интернет-сервис формирования G-кода из BMP, JPG, GIF, PNG
Выбрать изображение
BMP, JPG, GIF или PNG.
Программа для ЧПУ на Ардуино для фрезеровки, гравировки, 3D-сканирования
Скачать последнюю версию программы управления станком с ЧПУ на Ардуино
Для корректного скачивания программного обеспечения для станка с ЧПУ на базе Arduino нажмите правой кнопкой мыши на соответствующей ссылке
и в выпавшем меню выберите пункт Сохранить объект как .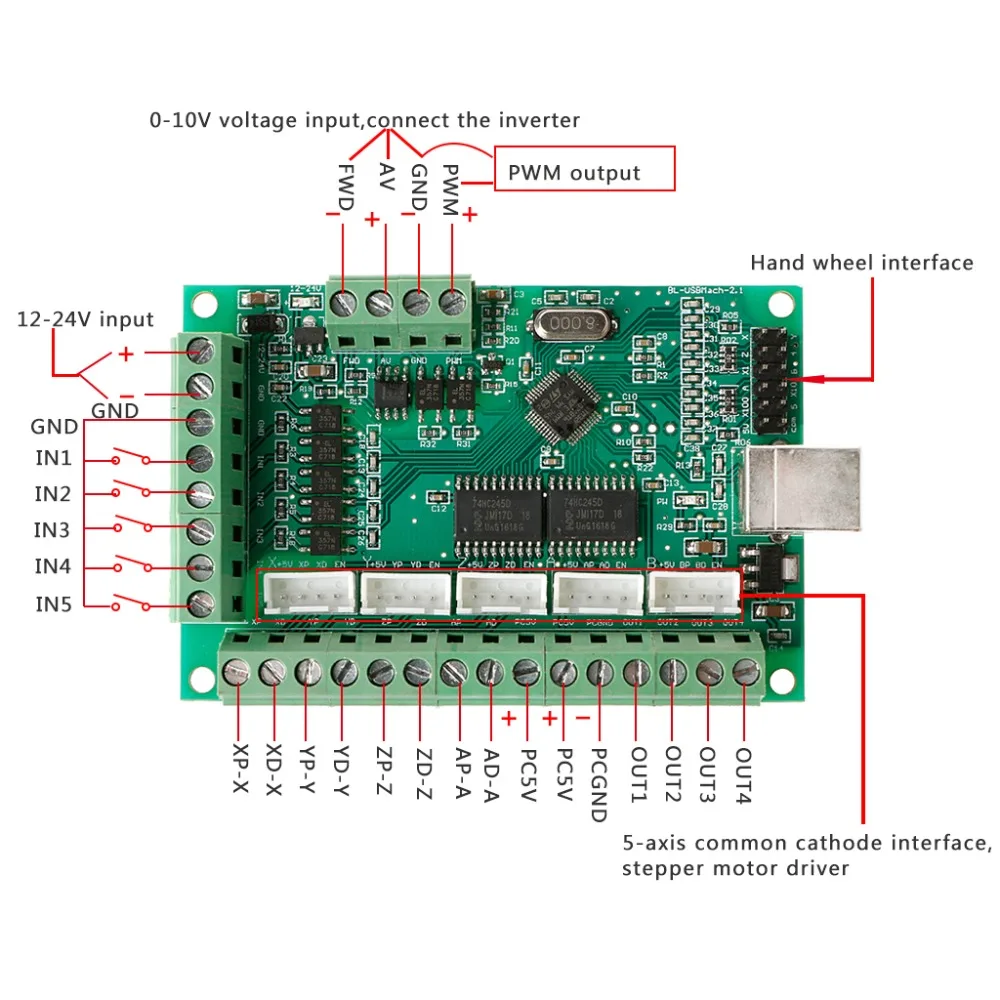
Руководство по программе для ЧПУ на Ардуино: настройка программы управления станком с ЧПУ
Экспорт G-кода
Настройка экспорта G-кода в программе ECNC
В программе ECNC , начиная с версии 2.
Скачать программу для Ардуино ЧПУ, установка программы ECNC
Программа управления ЧПУ на Ардуино для Windows
Скачать программу для работы со станком с ЧПУ на базе Ардуино
Здесь можно скачать Ардуино ЧПУ программу бесплатно .
Пошаговая инструкция по гравировке не металле на станке с ЧПУ
Гравировка на металле с помощью слабого лазера
Здесь я опишу, как гравировать на поверхности металла с помощью станка с ЧПУ и слабого лазерного модуля.
Электроника для сборки самого дешевого ЧПУ на Ардуино
Электроника, необходимая для изготовления простого самодельного станка с ЧПУ
При создании станка с CNC нам понадобятся следующие электронные компоненты:
компьютер
Для простого станка с ЧПУ понадобится обычный компьютер/ноутбук с одним свободным USB разъёмом.
ЧПУ на Ардуино, установка ременной передачи
Установка ременной передачи на станок с ЧПУ на Ардуино
Следующая доработка коснулась скорости работы станка с ЧПУ в ущерб его мощности.
ЧПУ на Ардуино, изготовление дешёвого станка для выжигания / гравировки лазером
Лазерный гравер с ЧПУ на Arduino
Продолжаем дорабатывать простой станок с ЧПУ на Arduino.
ЧПУ на Ардуино, изготовление простого контактного 3D-сканера на Ардуино
Делаем контактный 3D-сканер из дешевого станка с ЧПУ на базе Ардуино
Продолжаем дорабатывать простой станок с ЧПУ на Arduino.
ЧПУ на Ардуино, установка мощных двигателей 17HS3404N (корпус Nema 17) и драйверов DM420A
Подключаем к станку с ЧПУ на базе Ардуино более мощные и быстрые ШД 17HS3404N в корпусе Nema 17 и драйверы шаговых двигателей DM420A
Порывшись на любимом мной сайте китайских товаров выбрал, как мне кажется самый бюджетный и подходящий вариант: гибридные шаговые двигатели 17HS3404N в корпусе Nema 17 с четырьмя управляющими проводами и драйвера ШД DM420A.
ЧПУ на Ардуино, изготовление дешёвого станка ЧПУ
Домашний ЧПУ на Arduino
С чего начать изготовление дешевого станка с ЧПУ
Надо определиться, какие двигатели и какую управляющую электронику для ЧПУ будем использовать.
Драйвер ШД ULN2003 для униполярных двигателей, ЧПУ на Ардуино
Драйвер на ULN2003 для униполярных двигателей, Самый дешёвый ЧПУ
Описание возможностей драйвера ULN2003 шагового двигателя, который использовался при изготовлении самого дешёвого ЧПУ
Фото драйвера униполярных шаговых двигателей на ULN2003 для самого дешевого станка с ЧПУ
Основные характеристики драйвера униполярных ШД на ULN2003
назначение: только для управления униполярными (с 5 выводами) шаговыми двигателями;
напряжение управления: 5 вольт;
максимальное напряжение питания ШД: 12 вольт;
максимальный ток питания ШД: зависит от охлаждения;
настройки: отсутсвуют .
Самодельный станок с ЧПУ, модификация, апгрейд, ускорение, лазерная гравировка, 3D-сканер, 3D-принтер
Модификации простого самодельного станка с ЧПУ
Дешёвый станок с ЧПУ на базе Ардуино претерпел множество модификаций, целью которых было ускорить работу, получить новый функционал.
Шаговый двигатель 28BYJ-48-5V, ЧПУ на Ардуино
Униполярный шаговый двигатель 28BYJ-48-5V, Самый дешёвый ЧПУ
Описание возможностей шагового двигателя 28BYJ-48-5V, который использовался при изготовлении самого дешёвого ЧПУ
Фото шагового двигателя 28BYJ-48-5V для самого дешевого станка с ЧПУ
Основные характеристики шагового двигателя 28BYJ-48-5V
— напряжение питания: 5 вольт;
— тип двигателя: униполярный ;
— количество выводов: 5 проводов;
— шагов на полный оборот: 2048 шагов;
— задержка между шагами: 2 миллисекунды;
— итого, на полный оборот: 4 секунды.
Самодельный станок с ЧПУ, компоненты, составляющие, лазерная гравировка, 3D-сканер, 3D-принтер, описание
Описание составляющих простого самодельного станка с ЧПУ
Самый дешёвый станок с ЧПУ.
Детали для сборки самого дешевого ЧПУ на Ардуино
Механические детали простого самодельного станка с ЧПУ
При создании станка с CNC нам понадобятся следующие детали:
фанера 6мм
Для простого станка с ЧПУ понадобится менее 1 квадратного метра фанеры 6мм.
ЧПУ на Ардуино, чертежи, модель и сборка простой рамы для станка с ЧПУ
Чертежи рамы станка с ЧПУ
Классическая рама дешёвого станка с ЧПУ на Ардуино
Как сделать простую раму станка с ЧПУ? С чего начать изготовление станка с ЧПУ?
Для того, чтобы сделать классическую раму станка с ЧПУ , нам понадобится примерно 1 кв.
Архитектура, схема сборки и подключения электроники простейшего ЧПУ на Ардуино
Архитектура станка с ЧПУ на базе Arduino
Простая рама дешёвого станка с ЧПУ на Ардуино
Первый вариант рамы был изготовлен из тонкой фанеры 6 мм.
Сокол, выгравированный CO2-лазером на станке с ЧПУ на Ардуино
Фото сокола на CO2-лазерном ЧПУ
Сокол, выгравированный CO2-лазером на станке с ЧПУ на Ардуино
Сокол, выгравированный CO2-лазером на станке с ЧПУ на Ардуино
Размер картины 200×140 мм.
Шкатулка с медальоном, сделанная с использованием станка с ЧПУ на Ардуино с CO2-лазерной резкой
Шкатулка с медальоном на CO2-лазерном ЧПУ
Шкатулка с медальоном, сделанная с использованием станка с ЧПУ на Ардуино с CO2-лазерной резкой
Шкатулка с медальоном, сделанная с использованием станка с ЧПУ на Ардуино с CO2-лазерной резкой.
Видео CO2-лазерной резки подсвечника из фанеры на простом ЧПУ
Видео CO2-лазерной резки подсвечника из фанеры на простом ЧПУ
Вырезаем детали подсвечника для чайных свечей на самодельном ЧПУ для CO2-резки
Резка углекислотным лазером деталей подсвечника из фанеры.
Гравирование лазером на полосе из нержавейки на станке с ЧПУ на базе Ардуино
Видео простого станка с ЧПУ
Гравирование лазером печатной платы на станке с ЧПУ на базе Ардуино
Гравирование лазером на полосе из нержавейки на станке с ЧПУ на базе Ардуино.
Простой орнамент, нарисованный станком с ЧПУ на Ардуино с ременным приводом
Фото простого станка с ЧПУ
Простой орнамент, нарисованный станком с ЧПУ на Ардуино с ременным приводом
Простой орнамент, который был нарисован станком с ЧПУ с ременным приводом на Ардуино .
Фото станка с ЧПУ на Ардуино с ременной передачей
Фото простого станка с ЧПУ
Фото станка с ЧПУ на Ардуино с ременным приводом
Фото станка с ЧПУ на Ардуино с ременной передачей .
Фото / Видео простого самодельного ЧПУ и его модификаций
Фото, Видео простого станка с ЧПУ
Фотографии и видео работы самодельного станка с ЧПУ и его модификаций: мощная модель ЧПУ, быстрый ЧПУ, 3D-сканер, 3D-принтер.
Гравирование лазером печатной платы на станке с ЧПУ на базе Ардуино
Видео простого станка с ЧПУ
Гравирование лазером печатной платы на станке с ЧПУ на базе Ардуино
Гравирование печатной платы фиолетовым лазером на станке с ЧПУ .
Гравирование лазером простого орнамента на станке с ЧПУ на базе Ардуино
Видео простого станка с ЧПУ
Гравирование лазером простого орнамента на станке с ЧПУ на базе Ардуино
Гравирование простого орнамента фиолетовым лазером на станке с ЧПУ .
Простой орнамент, выгравированный на фанере лазером на ЧПУ Ардуино
Простой орнамент, выгравированный на фанере лазером на станке с ЧПУ на Ардуино
Гравирование простого орнамента фиолетовым лазером на станке с ЧПУ .
Станок с ЧПУ, контроллер: Arduino, драйверы ШД: DM420A, шаговые двигатели: 17HS3404N
Фото простого станка с ЧПУ
Станок с ЧПУ, контроллер: Arduino, драйверы ШД: DM420A, шаговые двигатели: 17HS3404N
Более мощный вариант станка с ЧПУ на базе Ардуино.
2D фрезерование простого орнамента
Фото простого станка с ЧПУ
2D фрезерование простого орнамента
2D фрезерование простого орнамента.
2D фрезерование силуэта рыбы-молот
Фото простого станка с ЧПУ
2D фрезерование силуэта рыбы-молот
2D фрезерование силуэта рыбы-молот.
Фото / Видео простого самодельного ЧПУ и его модификаций
Фото, Видео простого станка с ЧПУ
Фотографии и видео работы самодельного станка с ЧПУ и его модификаций: мощная модель ЧПУ, быстрый ЧПУ, 3D-сканер, 3D-принтер.
2D фрезерование силуэта дельфина
Фото простого станка с ЧПУ
2D фрезерование силуэта дельфина.
Дешёвый станок с ЧПУ на базе Ардуино рисует цветок
Видео простого станка с ЧПУ
Дешёвый станок с ЧПУ на базе Ардуино рисует цветок
Станок с ЧПУ рисует цветок.
Фото рисунка, сделанного простейшим станком с ЧПУ на Ардуино
Фото простого станка с ЧПУ
Самый дешёвый станок с ЧПУ нарисовал цветок
Результаты тестирования.
Фото станка с ЧПУ на Arduino, полная комплектация: нетбук, рама, шаговые двигатели, драйверы
Фото простого станка с ЧПУ
Полный комплект станка с ЧПУ на Ардуино
Фото станка с ЧПУ на Arduino в полной комплектации.
Лев, выгравированный на стекле CO2-лазером на станке с ЧПУ на Ардуино
Лев, выгравированный на стекле CO2-лазером на станке с ЧПУ на Ардуино
Лев, выгравированный на стекле CO2-лазером на станке с ЧПУ на Ардуино
Размер картины 116×80 мм.
ЧПУ на Ардуино, Гравировка фотографии на стекле CO2-лазером
Гравировка фотографии на стекле CO2-лазером в программе управления станком с ЧПУ на Ардуино
Гравировка в программе
Запускаем программу ECNC для управления ЧПУ на Ардуино.
Фото простого станка с ЧПУ на Ардуино, крупный план
Фото простого станка с ЧПУ
Крупный план станка с ЧПУ.
ЧПУ на Ардуино, Весь комплекс для фрезерования в сборе
Фото простого станка с ЧПУ
Весь комплекс для фрезерования в сборе.
Ваза, вырезанная из 3мм фанеры CO2-лазером на станке с ЧПУ на Ардуино
Фото вазы, вырезанной CO2-лазерном ЧПУ из фанеры
Ваза, вырезанная из 3мм фанеры CO2-лазером на станке с ЧПУ на Ардуино
Ваза, вырезанная из 3мм фанеры CO2-лазером на станке с ЧПУ на Ардуино
Примерные размеры вазочки 150x140x80 мм.
Фото / Видео простого самодельного ЧПУ и его модификаций
Фото, Видео простого станка с ЧПУ
Фотографии и видео работы самодельного станка с ЧПУ и его модификаций: мощная модель ЧПУ, быстрый ЧПУ, 3D-сканер, 3D-принтер.
Самодельный станок с ЧПУ своими руками, сборка, модификации
Добро пожаловать на сайт открытого проекта по разработке станка с ЧПУ на базе Arduino своими руками
Проект Простой станок с ЧПУ на Ардуино задумывался для разработки, отладки и тестирования программного обеспечения, необходимого для работы станков с числовым программным управлением (ЧПУ).
Фото / Видео простого самодельного ЧПУ и его модификаций
Фото, Видео простого станка с ЧПУ
Фотографии и видео работы самодельного станка с ЧПУ и его модификаций: мощная модель ЧПУ, быстрый ЧПУ, 3D-сканер, 3D-принтер.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Как сделать станок с ЧПУ на Ардуино с CO2-резкой?
При обдумывании конструкции станка делал упор на следующие моменты:
Минимальная стоимость;
Доступность комплектующих;
Простота изготовления;
Минимальное количество деталей;
Совместимость с имеющимся программным обеспечением;
Возможность для дальнейших модификаций, доработок.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Комплектующие из Китая для ЧПУ на Ардуино с CO2-резкой
Заказываем в Китайских интернет-магазинах, например на aliexpress.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Комплектующие для ЧПУ на Ардуино с CO2-резкой из местных магазинов
Закупался в строительном супермаркете Леруа Мерлен , зоомагазине 4 лапы и местных строительных мегазинах.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Осмотр комплектующих, сборка и тестирование лазерного комплекса
Когда пришла трубка, обязательно проверяем её целостность, как снаружи, так и внутри.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Система охлаждения для CO2-лазера (чиллер) своими руками
Итак, лазерный комплекс работает.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Собираем раму для ЧПУ с CO2-лазером своими руками
Рама будет с рабочим полем 500×500 мм.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Компоновка бюджетного станка с ЧПУ для CO2-резки
Вид сверху станка с ЧПУ для лазерной углекислотной резки.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Изготовление оправ для зеркал и линзы CO2-лазера для ЧПУ
Из алюминиевого уголка 50х20х2 сделал оправки для зеркал и линз.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Калибровка зеркал и трубки CO2-лазера станка с ЧПУ
Приступаем к калибровке зеркал.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Подключение электроники станка с ЧПУ для резки CO2-лазером
Заземляем блок питания.
ЧПУ на Ардуино, изготовление простого ЧПУ с CO2-лазером
Станок с ЧПУ на Ардуино с CO2-лазером
Включение станка с ЧПУ на Arduino для CO2-резки
Для запуска станка потребуется следующее.
ЧПУ на Ардуино, Резка по рисунку
Резка по рисунку в программе управления станком с ЧПУ на Ардуино
Введение
В связи с пожеланиями пользователей задумался над возможностью резки, гравировки по рисунку в программе.
ЧПУ на Ардуино, Резка по рисунку
Резка / гравировка на ЧПУ по рисунку
Предварительная подготовка растрового изображения (BMP,JPG,PNG) перед ЧПУ резкой
Далее, буду описывать последовательность действий и комментировать, что делет программа на разных этапах обработки изображения для ЧПУ.
ЧПУ на Ардуино, Резка по рисунку
Резка / гравировка на ЧПУ по рисунку
Прошивка ардуино
Чтобы станок правильно работал необходимо установить нужную пришивку в ардуино.
ЧПУ на Ардуино, Резка по рисунку
Резка / гравировка на ЧПУ по рисунку
Заключение
Обратите внимание, как качественно нейронная сеть преобразовала изображение с сеткой, двумя фонами и водяными знаками в вектор, а затем в растр, понятный ЧПУ на Ардуино.
ЧПУ на Ардуино, Гравировка фотографии на стекле CO2-лазером
Гравировка фотографии на стекле CO2-лазером в программе управления станком с ЧПУ на Ардуино
Гравировка в программе
Запускаем программу ECNC для управления ЧПУ на Ардуино.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка фотографии CO2-лезром в программе управления станком с ЧПУ на Ардуино
Подоготовка фотографии / картины для гравировки CO2-лазером
Далее опишу, как в программе управления простым станком с ЧПУ на Arduino, выполнить граивровку картины или фотографии CO2-лазером.
ЧПУ на Ардуино, Гравировка фотографии на стекле CO2-лазером
Гравировка фотографии на стеклянном стакане CO2-лазером
Изготовление оснастки для вращения круглой заготовки
Оснастка систоит из основания, изготовленного из обычной доски.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка фотографии CO2-лезром в программе управления станком с ЧПУ на Ардуино
Подключение ШИМ Ардуино для управления мощностью CO2-лазера
Для управления мощностью CO2-лазера используется PWM (ШИМ, широтно-импульсная модуляция).
ЧПУ на Ардуино, Гравировка CO2-лазером картинки на цилиндрической поверхности
Гравировка фотографии на стеклянном стакане CO2-лазером
Доработка ЧПУ для гравировки на цилиндре
Для гравировки на стаканах, вазах и прочих предметах, имеющих цилиндрическую поверхность, можно изготовить отдельный станок.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка на фанере фотографии CO2-лазером в программе управления станком с ЧПУ на Ардуино
Гравировка в программе
Запускаем программу eCNC для управления ЧПУ на Ардуино.
ЧПУ на Ардуино, Гравировка CO2-лазером картинки на стекле
Гравировка фотографии на плоском прозрачном стекле CO2-лазером
Введение
CO2-лазер легко гравирует на обычном стекле.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка надписи на металле CO2-лезром с помощью пасты в программе управления станком с ЧПУ на Ардуино
Подоготовка изображения для гравировки CO2-лазером
Далее опишу, как в программе управления простым станком с ЧПУ на Arduino, выполнить гравировку орнамента CO2-лазером.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка надписи на металле CO2-лезром с помощью пасты в программе управления станком с ЧПУ на Ардуино
Подготовка металлической поверхности и нанесение пасты перед CO2-гравировкой
Перед нанесение пасты шлифуем поверхность.
Прошивка для Arduino + CNC Shield, MKS DLC для гравировки и резки орнаментов и силуэтов на ЧПУ Ардуино CO2-лазером
Прошивка для станка с ЧПУ, Ардуино + CNC Shield, MKS DLC
Краткое описание
Контроллер: Ардуино UNO, Mega + CNC Shiled v3.
Скачать прошивку для MKS DLC, CNC Shield ЧПУ, выбор прошивки MKS DLC, CNC Shield
Прошивки MKS DLC и CNC Shield для станка с ЧПУ
Предложеннные прошивки могут быть загружены в контроллеры MKS DLC v1.
Прошивка для MKS DLC, CNC Shield для фрезеровки шпинделем на ЧПУ на Ардуино
Прошивка контроллера MKS DLC и CNC Shield для станка с ЧПУ
Краткое описание
Контроллер: MKS DLC v1.
ЧПУ на Ардуино, Резка по рисунку
Изготовление оправы для линзы в программе управления станком с ЧПУ на Ардуино
Подготовка изображения
В этом примере сделаем простенькую лупу.
ЧПУ на Ардуино, Резка по рисунку
Резка на ЧПУ по рисунку, сделанному в Paint
Прошивка ардуино
Чтобы станок правильно работал необходимо установить нужную пришивку в ардуино.
Прошивка для Arduino + CNC Shield, MKS DLC для гравировки и резки орнаментов и силуэтов на ЧПУ Ардуино CO2-лазером
Прошивка для станка с ЧПУ, Ардуино + CNC Shield, MKS DLC
Краткое описание
Контроллер: Ардуино UNO, Mega + CNC Shiled v3.
Часто задаваемые вопросы по ЧПУ на Ардуино
Вопросы и ответы
Как получить исходный код програмы управления ЧПУ на ардуино?
Чтобы получить исходный код, надо что-то сделать для проекта.
ЧПУ на Ардуино, Гравировка фотографии CO2-лазером
Гравировка надписи на металле CO2-лезром с помощью пасты в программе управления станком с ЧПУ на Ардуино
Прошивка Ардуино для гравировки CO2-лазером на металле с помощью пасты
Прошивка будет использоваться та же, что и для гравировки фотографий на фанере.
Как получить исходники программы ECNC
Как получить исходный код програмы управления ЧПУ на ардуино?
Немного истории
Изначально проект задумывался, как полностью открытый.
Как получить исходники программы ECNC, Минимальный функционал
Как получить исходный код програмы управления ЧПУ на ардуино?
Что делать НЕ НАДО
Не нужно писать мне письма с просьбой о предоставлении исходников программы
Не предлагайте мне сотрудничество и не просите исходники под предлогом: «Мы же партнеры — мы должны доверять друг-другу».
Рассчет максимальной скорости каретки
Скорость перемещения каретки
Как определить задержку между шагами ШД
Если задержку между шагами поставить слишком маленькую, то получим пропуски.
Большой портальный фрезерный станок с ЧПУ своими руками / Хабр
Здравствуй дорогой читатель, в этой статье хочу поделиться своим опытом постройки фрезерного портального станка с числовым программным управлением.
Подобных историй в сети очень много, и я наверное мало кого удивлю, но может эта статья будет кому то полезна. Эта история началась в конце 2016 года, когда я со своим другом – партнером по разработке и производству испытательной техники аккумулировали некую денежную сумму. Дабы просто не прогулять деньги (дело то молодое), решили их вложить в дело, после чего пришла в голову идея изготовления станка с ЧПУ. У меня уже имелся опыт постройки и работы с подобного рода техникой, да и основной областью нашей деятельности является конструирование и металлообработка, что сопутствовало идее с постройкой станка ЧПУ.
Вот тогда то и началась движуха, которая длиться и по сей день…
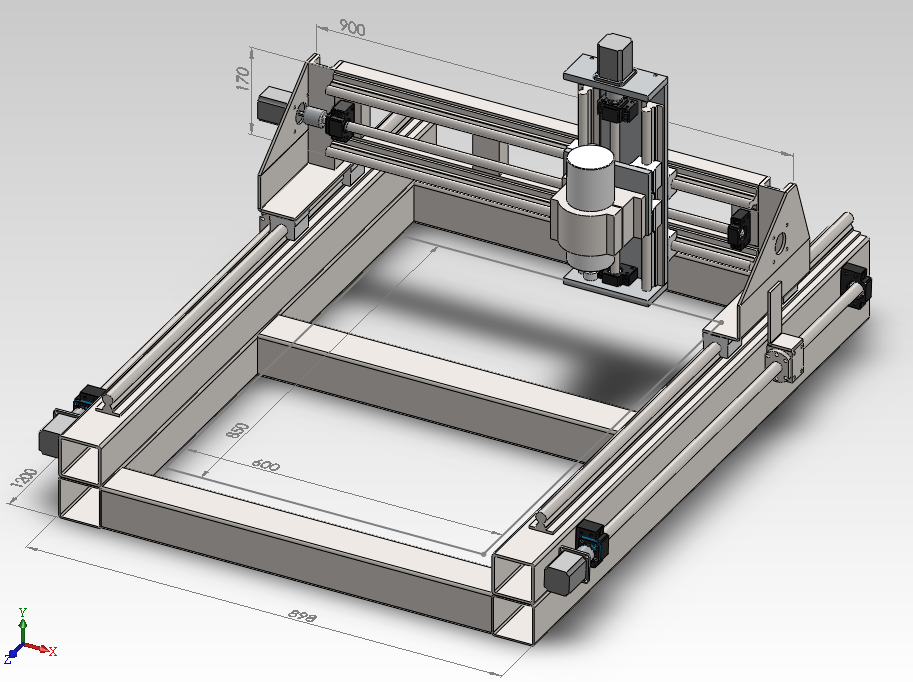
Продолжилось все с изучения форумов посвященных ЧПУ тематике и выбора основной концепции конструкции станка. Предварительно определившись с обрабатываемыми материалами на будущем станке и его рабочим полем, появились первые бумажные эскизы, в последствии которые были перенесены в компьютер. В среде трех мерного моделирования КОМПАС 3D, станок визуализировался и стал обрастать более мелкими деталями и нюансами, которых оказалось больше чем хотелось бы, некоторые решаем и по сей день.
Одним из начальных решений было определение обрабатываемых на станке материалов и размеры рабочего поля станка. Что касается материалов, то решение было достаточно простым — это дерево, пластик, композитные материалы и цветные металлы (в основном дюраль). Так как у нас на производстве в основном металлообрабатывающие станки, то иногда требуется станок, который обрабатывал бы быстро по криволинейной траектории достаточно простые в обработке материалы, а это в последствии удешевило бы производство заказываемых деталей. Отталкиваясь от выбранных материалов, в основном поставляемых листовой фасовкой, со стандартными размерами 2,44х1,22 метра (ГОСТ 30427-96 для фанеры). Округлив эти размеры пришли к таким значениям: 2,5х1,5 метра, рабочее пространство определенно, за исключением высоты подъёма инструмента, это значение выбрали из соображения возможности установки тисков и предположили что заготовок толще 200мм у нас не будет. Так же учли тот момент, если потребуется обработать торец какой либо листовой детали длиной более 200мм, для этого инструмент выезжает за габариты основания станка, а сама деталь/заготовка крепится к торцевой стороне основания, тем самым может происходить обработка торца детали.
Конструкция станка представляет собой сборное рамное основание из 80-й профильной трубы со стенкой 4мм. По обе стороны длинны основания, закреплены профильные направляющие качения 25-го типоразмера, на которые установлен портал, выполненный в виде трех сваренных вместе профильных трубы того же типоразмера что и основание.
Станок четырех осевой и каждую ось приводит в движение шарико-винтовая передача. Две оси расположены параллельно по длинной стороне станка, спаренных программно и привязанных к Х координате. Соответственно оставшиеся две оси – это Y и Z координаты.
Почему именно остановились на сборной раме: изначально хотели делать чисто сварную конструкцию с закладными приваренными листами под фрезеровку, установку направляющих и опор ШВП, но для фрезеровки не нашли достаточно большого фрезерно-координатного станка. Пришлось рисовать сборную раму, чтобы была возможность обработать все детали своими силами с имеющимися на производстве металлообрабатывающими станками. Каждая деталь, которая подвергалась воздействию электродуговой сварки, была отожжена для снятия внутренних напряжений. Далее все сопрягаемые поверхности были выфрезерованны, и в последствии подгонки пришлось местами шабрить.
Залезая вперед, сразу хочу сказать, что сборка и изготовление рамы оказалась самым трудоемким и финансово затратным мероприятием в постройке станка. Первоначальная идея с цельно сваренной рамой по всем параметрам обходит сборную конструкцию, по нашему мнению. Хотя многие могут со мной и не согласиться.
Многие любители и не только, собирают такого рода и размера (и даже большего) станки у себя в мастерской или гараже, делая целиком сварную раму, но без последующего отжига и механической обработки за исключением сверления отверстий под крепление направляющих. Даже если повезло со сварщиком, и он сварил конструкцию с достаточно хорошей геометрией, то в последствии работы этого станка ввиду дребезга и вибраций, его геометрия будет уходить, меняться. Я конечно могу во многом ошибаться, но если кто то в курсе этого вопроса, то прошу поделиться знаниями в комментариях.
Сразу хочу оговориться, что станки из алюминиевого конструкционного профиля мы тут пока рассматривать не будем, это скорее вопрос другой статьи.
Продолжая сборку станка и обсуждая его на форумах, многие начали советовать сделать внутри рамы и снаружи диагональные стальные укосины для добавления еще большей жесткости. Мы этим советом пренебрегать не стали, но и добавлять укосины в конструкцию то же, так как рама получилась достаточно массивной (около 400 кг). А по завершению проекта, периметр обошъётся листовой сталью, что дополнительно свяжет конструкцию.
Давайте теперь перейдем к механическому вопросу этого проекта. Как было ранее сказано, движение осей станка осуществлялось через шарико–винтовую пару диаметром 25мм и шагом 10мм, вращение которой передается от шаговых двигателей с 86 и 57 фланцами. Изначально предполагали вращать непосредственно сам винт, дабы избавиться от лишних люфтов и дополнительных передач, но без них не обошлось в виду того, что при прямом соединении двигателя и винта, последний на больших скоростях начало бы разматывать, особенно когда портал находится в крайних положениях. Учитывая тот факт, что длина винтов по Х оси составила почти три метра, и для меньшего провисания был заложен винт диаметром 25мм, иначе хватило бы и 16 мм-го винта.
Этот нюанс обнаружился уже в процессе производства деталей, и пришлось быстрым темпом решать эту проблему путем изготовления вращающейся гайки, а не винта, что добавило в конструкцию дополнительный подшипниковый узел и ременную передачу. Такое решение так же позволило хорошо натянуть винт между опорами.
Конструкция вращающейся гайки довольно проста. Изначально подобрали два конических шарикоподшипника, которые зеркально одеваются на ШВП гайку, предварительно нарезав резьбу с ее конца, для фиксации обоймы подшипников на гайке. Подшипники вместе с гайкой вставали в корпус, в свою очередь вся конструкция крепится на торце стойки портала. Спереди ШВП гайки закрепили на винты переходную втулку, которую в последствии в собранном виде на оправке обточили для придания соостности. На неё одели шкив и поджали двумя контргайками.
Очевидно, что некоторые из вас, зададутся вопросом о том – «Почему бы не использовать в качестве механизма передающего движения зубчатую рейку?». Ответ достаточно прост: ШВП обеспечит точность позиционирования, большую двигающую силу, и соответственно меньший момент на валу двигателя (это то, что я с ходу вспомнил). Но есть и минусы – более низкая скорость перемещения и если брать винты нормального качества, то соответственно и цена.
Кстати, мы взяли ШВП винты и гайки фирмы TBI, достаточно бюджетный вариант, но и качество соответствующее, так как из взятых 9 метров винта, пришлось выкинуть 3 метра, ввиду несоответствия геометрических размеров, ни одна из гаек просто не накрутилась…
В качестве направляющих скольжения, были использованы профильные направляющие рельсового типоразмера 25мм, фирмы HIWIN. Под их установку были выфрезерованны установочные пазы для соблюдения параллельности между направляющими.
Опоры ШВП решили изготовить собственными силами, они получились двух видов: опоры под вращающиеся винты (Y и Z оси) и опоры под не вращающиеся винты (ось Х). Опоры под вращающиеся винты можно было купить, так как экономии ввиду собственного изготовления 4 деталей вышло мало. Другое дело с опорами под не вращающиеся винты – таких опор в продаже не найти.
Из сказанного ранее, ось Х приводится в движение вращающимися гайками и через ременную зубчатую передачу. Так же через ременную зубчатую передачу решили сделать и две другие оси Y и Z, это добавит большей мобильности в изменении передаваемого момента, добавит эстетики в виду установки двигателя не вдоль оси винта ШВП, а сбоку от него, не увеличивая габариты станка.
Теперь давайте плавно перейдем к электрической части, и начнем мы с приводов, в качестве них были выбраны шаговые двигатели, разумеется из соображений более низкой цены по сравнению с двигателями с обратной связью. На ось Х поставили два двигателя с 86-м фланцем, на оси Y и Z по двигателю с 56-м фланцем, только с разным максимальным моментом. Ниже постараюсь представить полный список покупных деталей…
Электрическая схема станка довольно проста, шаговые двигатели подключаются к драйверам, те в свою очередь подключается к интерфейсной плате, она же соединяется через параллельный порт LPT с персональным компьютером. Драйверов использовал 4 штуки, соответственно по одной штуке на каждый из двигателей. Все драйвера поставил одинаковые, для упрощения монтажа и подключения, с максимальным током 4А и напряжением 50В. В качестве интерфейсной платы для станков с ЧПУ использовал относительно бюджетный вариант, от отечественного производителя, как указанно на сайте лучший вариант. Но подтверждать или опровергать это не буду, плата проста в своем применении и самое главное, что она работает. В своих прошлых проектах применял платы от китайских производителей, они тоже работают, и по своей периферии мало отличаются, от использованной мной в этом проекте. Заметил во всех этих платах, один может и не существенный, но минус, на них можно всего лишь установить до 3-х концевых выключателя, но на каждую ось требуется как минимум по два таких выключателя. Или я просто не разобрался? Если у нас 3-х осевой станок, то соответственно нам надо установить концевые выключатели в нулевых координатах станка (это еще называется «домашнее положение») и в самых крайних координатах чтобы в случае сбоя или не хватки рабочего поля, та или иная ось просто не вышла из строя (попросту не сломалась). В моей схеме использовано: 3 концевых без контактных индуктивных датчика и аварийная кнопка «Е-СТОП» в виде грибка. Силовая часть запитана от двух импульсных источников питания на 48В. и 8А. Шпиндель с водяным охлаждением на 2,2кВт, соответственно включенный через частотный преобразователь. Обороты устанавливаются с персонального компьютера, так как частотный преобразователь подключен через интерфейсную плату. Обороты регулируются с изменения напряжения (0-10 вольт) на соответствующем выводе частотного преобразователя.
Все электрические компоненты, кроме двигателей, шпинделя и конечных выключателей были смонтированы в электрическом металлическом шкафу. Все управление станком производится от персонального компьютера, нашли старенький ПК на материнской плате форм фактора ATX. Лучше бы, чуть ужались и купили маленький mini-ITX со встроенным процессором и видеокартой. При не малых размерах электрического ящика, все компоненты с трудом разместились внутри, их пришлось располагать достаточно близко друг к другу. В низу ящика разместил три вентилятора принудительного охлаждения, так как воздух в нутрии ящика сильно нагревался. С фронтальной стороны прикрутили металлическую накладку, с отверстиями под кнопки включения питания и кнопки аварийного останова. Так же на этой накладке разместили панельку для включения ПК, ее я снял с корпуса старого мини компьютера, жаль, что он оказался не рабочим. С заднего торца ящика тоже закрепили накладку, в ней разместили отверстия под разъемы для подключения питания 220V, шаговых двигателей, шпинделя и VGA разъем.
Все провода от двигателей, шпинделя, а также водяные шланги его охлаждения проложили в гибкие кабель каналы гусеничного типа шириной 50мм.
Что касается программного обеспечение, то на ПК размещенного в электрическом ящике, установили Windows XP, а для управления станком применили одну из самых распространенных программ Mach4. Настройка программы осуществляется в соответствии с документацией на интерфейсную плату, там все описано достаточно понятно и в картинках. Почему именно Mach4, да все потому же, был опыт работы, про другие программы слышал, но их не рассматривал.
Технические характеристики:
Рабочее пространство, мм: 2700х1670х200;
Скорость перемещения осей, мм/мин: 3000;
Мощность шпинделя, кВт: 2,2;
Габариты, мм: 2800х2070х1570;
Вес, кг: 1430.
Список деталей:
Профильная труба 80х80 мм.
Полоса металлическая 10х80мм.
ШВП TBI 2510, 9 метров.
ШВП гайки TBI 2510, 4 шт.
Профильные направляющие HIWIN каретка HGh35-CA, 12 шт.
Рельс HGh35, 10 метров.
Шаговые двигатели:
NEMA34-8801: 3 шт.
NEMA 23_2430: 1шт.
Шкив BLA-25-5M-15-A-N14: 4 шт.
Шкив BLA-40-T5-20-A-N 19: 2 шт.
Шкив BLA-30-T5-20-A-N14: 2 шт.
Плата интерфейсная StepMaster v2.5: 1 шт.
Драйвер шагового двигателя DM542: 4шт. (Китай)
Импульсный источник питания 48В, 8А: 2шт. (Китай)
Частотный преобразователь на 2,2 кВт. (Китай)
Шпиндель на 2,2 кВт. (Китай)
Основные детали и компоненты вроде перечислил, если что-то не включил, то пишите в комментарии, добавлю.
Опыт работы на станке: В конечном итоге спустя почти полтора года, станок мы все же запустили. Сначала настроили точность позиционирования осей и их максимальную скорость. По словам более опытных коллег максимальная скорость в 3м/мин не высока и должна быть раза в три выше (для обработки дерева, фанеры и т.п.). При той скорости, которой мы достигли, портал и другие оси упершись в них руками (всем телом) почти не остановить — прёт как танк. Начали испытания с обработки фанеры, фреза идет как по маслу, вибрации станка нет, но и углублялись максимум на 10мм за один проход. Хотя после заглубляться стали на меньшую глубину.
По игравшись с деревом и пластиком, решили погрызть дюраль, тут я был в восторге, хоть и сломал сначала несколько фрез диаметром 2 мм, пока подбирал режимы резания. Дюраль режет очень уверенно, и получается достаточно чистый срез, по обработанной кромке.
Сталь пока обрабатывать не пробовали, но думаю, что как минимум гравировку станок потянет, а для фрезеровки шпиндель слабоват, жалко его убивать.
А в остальном станок отлично справляется с поставленными перед ним задачами.
Вывод, мнение о проделанной работе: Работа проделана не малая, мы в итоге изрядно приустали, так как ни кто не отменял основную работу. Да и денег вложено не мало, точную сумму не скажу, но это порядка 400т.р. Помимо затрат на комплектацию, основная часть расходов и большая часть сил, ушла на изготовление основания. Ух как мы с ним намаялись. А в остальном все делалось по мере поступления средств, времени и готовых деталей для продолжения сборки.
Станок получился вполне работоспособным, достаточно жестким, массивным и качественным. Поддерживающий хорошую точность позиционирования. При измерении квадрата из дюрали, размерами 40х40, точность получилась +- 0,05мм. Точность обработки более габаритных деталей не замеряли.
Что дальше…: По станку есть еще достаточно работы, в виде закрытия пыле — защитой направляющих и ШВП, обшивки станка по периметру и установки перекрытий в середине основания, которые будут образовывать 4 больших полки, под объем охлаждения шпинделя, хранения инструмента и оснастки. Одну из четвертей основания хотели оснастить четвертой осью. Также требуется на шпиндель установить циклон для отвода и сбора стружки о пыли, особенно если обрабатывать дерево или текстолит, от них пыль летит везде и осаждается повсюду.
Что касается дальнейшей судьбы станка то тут все не однозначно, так как у меня возник территориальный вопрос (я переехал в другой город), и станком заниматься сейчас почти некому. И вышеперечисленные планы не факт что сбудутся. Не кто этого два года назад и предположить не мог.
В случае продажи станка с его ценником все не понятно. Так как по себестоимости продавать откровенно жалко, а адекватная цена в голову пока не приходит.
На этом я пожалуй закончу свой рассказ. Если что-то я не осветил, то пишите мне, и я постараюсь дополнить текст. А в остальном многое показано в видео про изготовления станка на моем YouTube канале.
Фрезерный станок с ЧПУ своими руками: конструкция, размеры
Любой мастер, работающий с металлом, мечтает о приобретении дополнительного оборудования для расширения возможностей в плане производства. Однако новые станки не каждому по карману. Чтобы оборудовать мастерскую не обязательно покупать дорогое оборудование. Можно изготовить фрезерный станок с ЧПУ своими руками.
Фрезерный станок с ЧПУ своими рукамиОсобенности устройстваСовременные фрезерные станки с ЧПУ представляют собой набор разнообразных механизмов, которые зависят друг от друга. Создать идентичную машину в домашних условиях невозможно. Однако это не означает, что нельзя собрать более простой станок. Главное знать из каких деталей он состоит и как их правильно объединить между собой.
КонструкцияФрезерный станок представляет собой конструкцию, к которой есть режущая часть, корпус (конструкция), подвижные и соединительные элементы. Необходимо обозначить ключевые элементы оборудования:
- Станина. Представляет собой массивное основание, которое должно гасить вибрации двигателя и не давать станку двигаться при работе.
- Рабочий стол. Должен быть изготовлен из листа металла, чтобы при обработке заготовки не повредить рабочую поверхность.
- Направляющая станина по которой будет передвигаться режущая часть.
- Шпиндель.
- Направляющие для возможности изменения положения рабочего стола.
Главным элементом станка является электродвигатель. Выбирать его мощность необходимо в зависимости от обрабатываемых материалов. Минимальная мощность — 500 Вт. Оптимальным считается показатель в 2 кВт.
Выбирая электродвигатель на самодельный станок, желательно покупать модель с возможностью регулирования оборотов. Таким образом можно увеличить функционал самодельного оборудования и обрабатывать гораздо больше видов материалов.
Также на самодельный станок необходимо установить контроллер ЧПУ. Он представляет собой частотный конвектор и материнскую плату. Эти два элемента необходимо закрыть защитным кожухом, который убережёт их от повреждения во время работы.
РазмерыРазмеры самодельного станка будут зависеть о того, какие детали и заготовки мастер хочет обрабатывать. Исходя из этого создаются рабочая поверхность. Нельзя забывать про то, что к размеру нужно прибавить направляющие, по которым будет передвигаться рабочий стол.
Рабочая поверхностьРуководство по изготовлениюСделать самодельный фрезерный станок с ЧПУ может любой человек. Для этого нужно подготовить инструменты и материалы. Также нельзя забывать про чертеж фрезерного станка. В интернете есть различные варианты сборки самодельного оборудования с подробными чертежами.
Инструменты и материалы для изготовленияКогда чертёж самодельного станка выбран, необходимо подготовить инструменты и материалы. Оборудование с ЧПУ требует дополнительной электроники для сборки.
Необходимые материалы:
- Шпиндель. Главный рабочий элемент.
- Материалы для изготовления каркаса. Для простых станков со слабыми электродвигателями, подойдёт фанера, МДФ, ДВП, ДСП. Если же оборудование массивное, необходимо делать каркас из металла.
- Кабель для подключения и защита для него.
- Управляющая плата.
- Крепежные элементы (шурупы, болты).
- Патрон для закрепления фрезы.
- Частотный преобразователь.
- Подшипники.
- Двигатели которые будут передвигать рабочую часть по осям Y, X, Z.
Инструменты:
- Набор ключей.
- Сварочный аппарат.
- Клей, паяльник, изолента.
- Болгарка для разрезания металлических уголков.
- Молоток, отвёртки.
- Ножовка по металлу.
- Дрель, шуруповерт.
К электроинструменту, необходимо подобрать оснастку. Это свёрла по металлу для дрели, биты для шуруповерта и отрезные круги для болгарки.
Ключевые конструктивные решенияПеред началом работ по сборке оборудования необходимо разобраться с ключевыми вопросами. К ним относятся:
- Допустимый бюджет на изготовление станка.
- Рабочее пространство в помещении (от этого будет исходить размер готовой конструкции).
- Используемые материалы при сборке.
- Рабочая площадь.
- Возможные допуски.
После ответа на эти вопросы можно приступать к основным работам.
Рабочее пространствоОснование и ось x осиВ первую очередь необходимо построить основную базу под ось X. При её выставлении, необходимо учитывать жёстко закреплённые детали и подвижные элементы конструкции.
Проектирование оси yИзначально идёт разметка и строительство оси Y. После этого общая конструкция разбивается на отдельные элементы. Учитываются силы и моменты на портале оси Y.
Схема сборки оси zПри проектировании и сборке оси Z, необходимо учитывать несколько особенностей. В первую очередь обратите внимание на силы и моменты на оси Z. Также нужно знать расстояние между подшипниками и учитывать количество направляющих.
Линейная система движенияДля каждого станка подбирается своя система линейного движения. Если бюджет не позволяет, необходимо самостоятельно сделать направляющие.
Компоненты механического приводаЧтобы собрать механический привод, необходимо понимать из каких компонентов он состоит:
- шаговые;
- серводвигатели;
- приводные гайки;
- стойки;
- шестерни;
- редуктор;
- муфта;
- крепления для двигателя.
В зависимости от типа станка компоненты могут меняться.
Выбор двигателяЧтобы выбрать качественный двигатель, необходимо знать какие разновидности подвижных элементов существуют. Перед тем как приобрести мотор, требуется изучить типы электродвигателей с ЧПУ, виды шаговых элементов. Важно учитывать параметры двигателя, чтобы знать с какими материалами допустимо работать.
электродвигателей с ЧПУКонструкция режущего столаПри эксплуатации станка, нельзя использовать двигатель на мощности в 80% длительное время. Из-за этого нужно выбирать более мощный мотор. Оптимальный расход мощности во время работы — 50–60%.
При малом бюджете, можно изготовить стол самостоятельно. Его размер будет зависеть от обрабатываемых заготовок и деталей. Для работы с металлом желательно делать массивный стол. Его нужно установить на направляющие, которые позволят ему передвигаться во время работы.
Параметры шпинделяШпиндель является главной частью станка. При обработке больших заготовок из твердой стали, необходимо выбирать модель с водным или воздушным охлаждением. Второй вариант более уместен если самодельный станок будет установлен в помещении с ограниченным пространством.
ЭлектроникаВ станках, управляемых при помощи ЧПУ, гораздо больше электроники, чем в обычных моделях, которые управляются механически. Важно заранее подготовить схему, на которой будут отображены все узлы соединения проводов, кнопки переключения и выключения, настройки режима работы. Также нельзя забывать про ответвление к источникам питания.
Параметры контроллера программного управленияКонтролер ЧПУ выбирается в зависимости от функций, которые он может выполнять. В этом плане всё зависит от желания и бюджета человека. Можно создать собственный контроллер ЧПУ своими руками, однако для этого необходимо разбираться в электронике, построении микросхем и работе процессоров.
Выбор программного обеспеченияНельзя забывать про программное обеспечение для ЧПУ. Самыми популярными являются:
- CAM;
- САПР;
- NC Controller.
Его выбор будет зависеть от выбранного контролера для управления ЧПУ и количества функций.
Ошибки и недочеты с которыми можно столкнутьсяПри сборке самодельного фрезерного станка, можно столкнуться с различными проблемами:
- Основная проблема большинства мастеров — отсутствие чёткого чертежа, на котором обозначены все крепёжные элементы, связки проводов. Из-за этого могут появиться трудности и путаница при сборке.
- Неправильный выбор мощности двигателя. Если электродвигатель будет слишком слабым, с его помощью нельзя будет обрабатывать твердые виды металла. Из-за этого функционал станка значительно сузится.
- Экономия на материале для сборки каркаса. Желательно изготавливать его из металла.
- Ошибки, связанные с выбором размера станка.
- Часто, мастера забывают заземлить станок и получают удар током во время включения самодельного оборудования.
- Для предотвращения пожара и поломки станка необходимо оборудовать его системой автоматического выключения.
- Отсутствие охлаждения фрезы.
- Неправильное программирование контролера ЧПУ.
- Ошибка с выбором питания для шагового двигателя. Часто этот элемент требует отдельного источника питания (установки дополнительного блока). Поэтому нужно заранее оценить возможность подключения дополнительного питания к шаговому двигателю.
Перед первым включением самодельного станка требуется проверить крепёжные элементы, подключение двигателей и кнопок для настройки. Перед началом работы запустите основной шпиндель и дайте поработать в течение 10 минут. За это время, оцените наличие посторонних звуков и вибрации. Если вибрация присутствует, утяжелите станину и проверьте основание, на котором стоит станок. Нельзя забывать про установку защиты от металлической стружки, которая будет лететь из-под фрезы во время работы.
Для собственной мастерской подойдёт самодельный станок ЧПУ. Перед его сборкой необходимо точно определить количество свободного места в помещении и выбрать размер будущего оборудования, найти чертёж в интернете и подготовить заранее материалы с инструментами.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Buildbotics Контроллер ЧПУ с открытым исходным кодом
Контроллер Buildbotics представляет собой полностью закрытый интеллектуальный станок с ЧПУ контроллер со встроенным веб-интерфейсом и усовершенствованным процессором GCode.Он может приводить в действие до 4 шаговых двигателей и множество различных инструментов, таких как шпиндель с ЧПУ, ЛАЗЕРНЫЙ резак или плазменный резак.
Купить уже сейчас в нашем магазине.
Передняя панель
Задняя панель
Включенный переключатель ввода / вывода
Подключение концевых выключателей, измерение оси Z, управление шпинделем с ШИМ, RS-485 управление шпинделем и переключение аварийного останова через входящий в комплект 25-контактный Плата ввода / вывода с простыми винтовыми клеммами.
Проверьте распиновку.
Включенный USB-геймпад
Легко и быстро настраивайте резку с помощью прилагаемого геймпада.
Кабели в комплекте
Контроллер Buildbotics обеспечивает следующую экономию времени готовые кабели:
- 4 x 10 ‘кабеля двигателя
- 2 штекера кабеля нагрузки
- 1 x кабель питания
Дополнительная веб-камера USB
С дополнительной камерой USB вы можете следить за своим ЧПУ с в любом месте с помощью веб-браузера или смартфона. Добавьте его в свой контроллер пакет, выбрав опцию в нашем магазине.
Варианты источников питания
Подключите любой источник питания, который выдает от 12 до 36 В постоянного тока с током не менее 6 А. с помощью прилагаемого кабеля питания выберите один из наших блоков питания в комплекте варианты в нашем магазине.
Встроенные драйверы шагового двигателя
- 4 канала драйвера двигателя
- До 6 А на канал
- 12–36 В постоянного тока
- До 256 микрошагов
- Плавное ускорение S-образной кривой
- Скорость шага до 250 к / с на канал.
Привод большинства двигателей NEMA 17, NEMA 23 и NEMA 34. Предварительная поддержка 4-я ось как ось вращения. Четвертый драйвер может быть синхронизирован с приводом одна ось с двумя моторами. Вот список некоторых моторы мы рекомендуем.
Ускорение S-образной кривой
Ускорение S-образной кривой — это расширенный алгоритм планирования движения, который сглаживает движение ЧПУ. Большинство контроллеров ЧПУ используют трапециевидные ускорение, которое намного проще, но приводит к рывкам, которые обеспечивает черновую резку и увеличивает износ как инструментов, так и ЧПУ сама машина.
Превосходная техническая поддержка
Получите реального человека , когда вам нужно. Предоставляем технические поддержка по электронной почте, телефону или через форум Buildbotics.
Ознакомьтесь с нашими отзывами чтобы увидеть, насколько нашим клиентам нравится наша техническая поддержка.
Есть вопросы?
Электронная почта ([email protected]) или позвоните нас (707-559-8539). Мы будем рады помочь.
Ознакомьтесь с нашими отзывами
Многие из наших клиентов построили новые ЧПУ, переоборудовали старые или модернизировали свои существующие станки, используя контроллер ЧПУ Buildbotics. Посмотрите их обзоры, чтобы увидеть что некоторые из них говорят.
Попробуйте программное обеспечение контроллера в Интернете
Сделайте свой ЧПУ невероятно простым в использовании с помощью контроллера Buildbotics интуитивно понятное встроенное программное обеспечение.
Нажмите здесь, чтобы попробовать демо.
Загрузите свой GCode и нажмите кнопку воспроизведения, чтобы запустить симуляцию Настоящий контроллер ЧПУ Buildbotics.
Узнайте, каково настраивать параметры двигателя, инструмента и концевого выключателя.
Совместим с большинством программ CAM
Контроллер Buildbotics с ЧПУ принимает GCode из программного обеспечения CAM, например Fusion 360, Mastercam, VCarve, BobCAD, MeshCAM, CamBam и многие другие. Проверьте свой GCode на совместимость с Buildbotics бесплатно с помощью CAMotics.
Надежная электроника
Мы знаем, что вы хотите, чтобы ваш ЧПУ работал именно тогда, когда вам это нужно. Тем не менее, многие дешевые контроллеры ЧПУ были разработаны с минимальным вниманием или без него к электробезопасности. Контроллер Buildbotics защищен от:
- Перегрузка по току
- Тепловая перегрузка
- Пониженное напряжение
- Обратное напряжение
- Короткое замыкание
- Скачки напряжения, вызванные остановкой двигателя
Stay Cool без вентилятора
Контроллер Buildbotics защищает от тепловой перегрузки.Благодаря тщательному отбору высококачественных электронных компонентов, Контроллер Buildbotics остается прохладным, без вентилятора, даже при движении 6А моторные нагрузки. Отсутствие вентилятора не только устраняет шум, но и позволяет избежать всасывание пыли и мусора.
Выделенный компьютер
не требуетсяТочно настроенный компьютер под управлением Mach или LinuxCNC не нужен. Ты можешь получить доступ к встроенному программному обеспечению контроллера Buildbotics с любого из ваших устройств и будьте уверены, что ваше ЧПУ будет работать бесперебойно и без сбоев.
Вы даже можете опробовать свои GCodes в Интернете с помощью нашего бесплатное демонстрационное программное обеспечение.
Быстрый, плавный и точный шаг
Получите максимальную производительность и точность от вашего ЧПУ. Строительная робототехника Контроллер обеспечивает плавную скорость шага до 250,000 в секунду позволяя использовать до 256 микрошагов на высоких скоростях.
Проводная или Wi-Fi сеть
Контроллер Buildbotics предлагает современный веб-интерфейс, доступный из браузер через вашу локальную сеть или Wi-Fi.Целая сеть Контроллерами Buildbotics можно управлять с одного компьютера.
Бесплатное программное обеспечение для моделирования
Создано все программное обеспечение, необходимое для запуска GCode на вашем станке с ЧПУ. в контроллер Buildbotics, но вы также можете использовать нашу бесплатную программное обеспечение для моделирования, чтобы протестировать ваш GCode перед его запуском.
CAMotics ЧПУ simulator вычисляет предварительный просмотр 3D-изображений из GCode. CAMotics также может отправлять GCode напрямую к контроллеру Buildbotics по сети и отслеживает положение машины во время ее работы.
Tool Control
Выходы PWM, разрешения и направления могут использоваться для управления широким диапазоном массив инструментальных головок. Соединение RS485 управляет высокоскоростным частотно-регулируемым приводом. управляемые шпиндели с воздушным или водяным охлаждением по двум проводам.
Встроенные переключатели нагрузки
Два переключателя нагрузки, каждый из которых может обеспечивать ток до 15 А, может питать подогреваемые кровати для 3D-принтеров, экструдеров, вакуумных столов или чего-то еще вы можете думать о.
Для нагрузок переменного тока недорого ССР переключатель можно использовать. Внешние реле можно использовать для более высокого усилителя. Нагрузки постоянного тока.
Алюминиевый корпус
Благодаря тщательному учету тепла на протяжении всего процесса проектирования Контроллер Buildbotics отводит тепло через алюминиевый корпус без вентилятора ограждение без засасывания металлической или деревянной стружки.
Четыре отверстия под винты позволяют легко установить корпус на или рядом с машина.
RaspberryPi 3 Inside
Встроенный Raspberry Pi 3 под управлением Linux на карте microSD емкостью 16 ГБ предоставляет огромный потенциал для реализации вашей следующей большой идеи. Установить дополнительное программное обеспечение или используйте Python для реализации собственных функций.
Протестировано
Контроллер Buildbotics успешно протестирован во многих сборках с ЧПУ как нами, так и нашими клиентами.
Мы сняли на видео строительство фрезерного станка с ЧПУ Taig, фрезерного станка OX с ЧПУ, станка K40. ЛАЗЕРНАЯ модернизация и модернизация Dyna Myte 2400. Посмотрите видео на нашем YouTube канал.
Ознакомьтесь с некоторыми станками, которые мы построили с ЧПУ Buildbotics контроллер.
Исходный код, схема и макет печатной платы
Добро пожаловать, разработчики программного и аппаратного обеспечения.Мы уже реализовано много интересных функций, но мы даже не поцарапали поверхность того, что может делать этот контроллер. Вот почему мы сделали все 100% Открытый источник.
Вот что вы можете найти на GitHub:
Как настроить Arduino и gShield
gShield потрясающий. Вы можете построить 3-осевой контроллер ЧПУ своими руками менее чем за 80 долларов!
Этот пост проведет вас через пошаговый процесс настройки вашего собственного контроллера ЧПУ DIY.Если вы хотите сразу погрузиться в воду, загрузите руководство по быстрому запуску здесь. Если вы застряли, вернитесь сюда, чтобы найти подробные инструкции по установке. Удачи!
Введение
Мне нравится gShield от Synthetos! Нет, мне не платят за это. Электроника пугает меня, как твердолобого механика. Я не могу сказать почему, они просто кажутся загадкой. Я получаю механические штуки. Я вижу, как это работает. Я не вижу электронов на печатной плате или единиц и нулей в программном обеспечении.
Войдите в Arduino. Это создало для меня совершенно новый мир. Это почти нерушимо. Я имею в виду, что уже несколько лет пытаюсь дать производителям курить из устройства. (Долгая шутка заключается в том, что производители вкладывают дым в электрические компоненты, который выпускается, когда кто-то облажается, и они поджаривают чип, что демонстрирует выходящий дым.) Комбинация Arduino с grblShield позволила мне создать контроллер ЧПУ своими руками для менее 80 долларов! Это безумие! И что самое приятное, я не привязан к якорю ПК с параллельным портом, который обычно требуется для работы драйверов шагового двигателя.
Поправьте меня, если я ошибаюсь, но я не знаю ни одного промышленного контроллера ЧПУ, который использует что-либо, кроме параллельного порта. Я имею в виду давай! Я не знаю ни одного принтера, который все еще использует параллельный порт. Пожалуйста, кто-нибудь избавит его от страданий. Хорошо, моя тирада закончена.
Одним из огромных преимуществ grblShield с Arduino является возможность использовать обычное старое USB-соединение. Добро пожаловать в 21 век года. Я знаю, что со стульев не упадешь. Моя мини-фабрика по страхованию гавани не такая уж и большая.Я действительно не хотел, чтобы контроллер был больше мельницы. Если бы мне пришлось использовать параллельный порт, это означало бы найти старый компьютер со стабильной версией Windows и, вероятно, использовать Mach4. Я не хотел с этим связываться.
Нажмите здесь, чтобы посмотреть видео на YouTube.
Ниже приводится пошаговое руководство по созданию 3-х осевого контроллера ЧПУ DIY. Давайте рассмотрим настройку, начав со списка оборудования, которое вам понадобится, а затем списка инструментов, которые упростят работу.
Обратите внимание, что некоторые из приведенных ниже ссылок являются партнерскими. Если вы решите совершить покупку по одной из приведенных ниже ссылок, я получу небольшую комиссию, которая поможет поддерживать этот сайт. Если нет, то это тоже хорошо. В любом случае ваша цена, которую вы платите, не изменится. Вы можете узнать больше о раскрытии информации о моей партнерской программе здесь.
Требуемое оборудование…
- Arduino UNO или клон Я неравнодушен к SparkFun RedBoard — запрограммирован с помощью Arduino
- gShield можно приобрести здесь у Synthetos
- Источник питания (12 или 24 В) Импульсный источник питания с одним выходом Mean Well SE-200-24 24 В 8.8A Я использовал источник питания 24 В, потому что grblShield рассчитан на 30 В и 2,5 А на драйвер. Я хочу увеличить мощность, насколько я могу вспомнить, P = IV, где P = мощность, I = ток и V = вольт. Если я скажу удвоить напряжение с 12 до 24, я удвою мощность, если ток I останется постоянным.
Пример 12 В — 2,5 А x 12 В = 30 Вт
Пример 24 В — 2,5 А x 24 В = 60 Вт
Кроме того, у большинства источников питания на 24 В есть винт регулировки напряжения, который позволяет мне получить около 28 В и еще больше увеличивает мощность на шаговый двигатель.
- Шаговый двигатель (и) NEMA23 425 унций / дюйм 2,8 А Шаговый двигатель ¼ ”Двойной вал
- ПК или ноутбук с USB-портом Нетбук ASUS
- Монтажный провод (многожильный калибр 14 или 16) 4-жильный экранированный кабель 18 AWG (25 футов)
- Конец разъема для блока питания Шнур питания переменного тока 6 футов 18 AWG 3 штыря
Вам также понадобятся следующие инструменты…
- Мультиметр — У меня есть измеритель плавности хода, который я купил в продаже несколько лет назад для других вещей.Они работают очень хорошо, но вы можете получить хороший счетчик за 10-20 баксов.
- Маленькая отвертка Паяльник
- — в зависимости от возраста вашего Arduino вам может потребоваться переставить перемычку
- Кусачки
- Инструмент для зачистки проводов
- Нож X-acto или аналог
Получите краткое руководство здесь
Обзор
- Загрузите и установите программное обеспечение grbl на свой Arduino
- Загрузите и установите универсальный отправитель Gcode на свой компьютер
- Подключите источник питания (подтвердите полярность источника питания и установите напряжение 110 В переменного тока)
- Подключаем блок питания к grblShield и тестируем
- Подключите grblShield к Arduino
- Проверить соединение
- Подключите шаговый двигатель к grblShield
- Проверить шаговый двигатель
Шаг 1. Загрузите и установите программное обеспечение grbl на свой Arduino
Следующий метод использует Arduino IDE (интегрированную среду разработки) для загрузки программного обеспечения grbl в Arduino.Этот процесс очень похож на загрузку «скетча» в ваш Arduino. Если вы не знакомы с загрузкой программного обеспечения в Arduino или у вас нет последней версии программного обеспечения Arduino на вашем ПК, то потратьте несколько минут, чтобы загрузить последнюю доступную IDE, нажав здесь.
- Перейдите на домашнюю страницу grbl на GitHub, нажав здесь.
- Нажмите кнопку «Загрузить ZIP» в правой части экрана. См. Рисунок ниже.
Снимок экрана страницы GitHub для программного обеспечения grbl.
- Сохраните файл на свой компьютер и распакуйте, чтобы создать папку grbl-master. Я поместил папку grbl-master в свою папку Arduino. Файловая структура будет выглядеть примерно так… / Arduino / grbl-master (обратите внимание, что путь установки Arduino по умолчанию — «C: \ Program Files (x86) \ Arduino»)
- Откройте Arduino IDE и убедитесь, что у вас установлена как минимум версия 1.8.10 (вы можете проверить, какая у вас версия Arduino IDE, перейдя в раскрывающееся меню «Справка» и выбрав «Об Arduino»)
- Затем вам нужно добавить библиотеку GRBL в IDE Arduino.Щелкните меню « Sketch », затем выберите « Включить библиотеку », затем выберите « Добавить библиотеку .ZIP »
- Найдите папку «Grbl», загруженную с сайта GRBL github (обратите внимание, что вам нужно будет щелкнуть папку «Grbl-Master», чтобы перейти в папку «Grbl». В противном случае вы получите сообщение об ошибке.)
- Щелкните раскрывающееся меню « Файл », затем « Примеры », затем « grbl » (это, вероятно, будет полностью внизу меню) и, наконец, « grblUpload ».Это откроет эскиз GRBL, который необходимо загрузить в Arduino.
- Подключите ваш Arduino и выберите com-порт, используемый вашим Arduino, используя выпадающее меню « Tools », затем « Port ».
- Загрузите эскиз GRBL в свой Arduino — Обязательно выберите com-порт, который использует ваш Arduino
Обратите внимание, когда я писал этот пост, последняя версия Arduino была 1.61
Шаг 2. Загрузите и установите отправитель Gcode на свой компьютер
Это программное обеспечение загружается на ваш компьютер и отправляет Gcode в Arduino.UniversalGcodeSender — это программное обеспечение на основе Java, для которого на вашем компьютере должна быть установлена как минимум Java 7. Вы можете проверить, установлена ли на вашем компьютере Java, перейдя сюда.
Щелкните кнопку «Активировать Java» в центре экрана, чтобы определить, установлена ли Java на вашем компьютере.
Чтобы загрузить последнюю версию Java, перейдите сюда. Обязательно обратите внимание при установке. Существует флажок, который позволяет изменить вашу поисковую систему и домашнюю страницу на «Yahoo.«Если вы не хотите, чтобы это произошло, обязательно снимите флажок. См. Снимок экрана ниже.
Не забудьте снять этот флажок во время установки Java, иначе поисковой системой по умолчанию будет Yahoo.
Теперь приступим к установке универсального отправителя Gcode…
- Перейдите на домашнюю страницу универсального отправителя gCode на GitHub, щелкнув здесь.
- Прокрутите страницу вниз до раздела «Загрузки». Мне нравится работать с последней стабильной сборкой в корпусе
1.0,81,0,9
- Щелкните номер версии, которую хотите загрузить.
- Распакуйте папку и поместите ее в папку «Program Files».
- Наконец, создайте ярлык на рабочем столе для расширения UniversalGcodeSender.jar, щелкнув файл правой кнопкой мыши и выбрав «отправить на», затем «рабочий стол (создать ярлык)».
- Дважды щелкните файл UniversalGcodeSender.jar
Вот и все! Программный бит готов. А теперь давайте соберем оборудование.Вы на правильном пути к запуску своего DIY-контроллера с ЧПУ.
Шаг 3. Подключите источник питания (подтвердите полярность и установите 110 В переменного тока)
ПРЕДУПРЕЖДЕНИЕ — Будьте здесь предельно осторожны. Вы имеете дело с переменным током 115 вольт (бытовая электросеть), что может быть очень опасно. Если вы не знаете, что делаете, обратитесь за помощью к лицензированному специалисту.
- Найдите переключатель входной мощности на источнике питания и установите его в соответствии с напряжением сети переменного тока, которое вы планируете использовать.Это действительно важно. Если переключатель установлен неправильно, вы выведите из строя блок питания. В моем случае я установил переключатель в положение «115 В переменного тока». См. Рисунок ниже.
Селекторный переключатель входа переменного напряжения, расположенный сбоку источника питания.
- Найдите донорский шнур питания для вашего блока питания. Я использовал старый шнур питания ПК и отрезал женский конец.
- Удалите примерно 1,5 дюйма (дюйма) внешней оболочки кабеля. Будьте осторожны, чтобы не порезать проводники внутри кабеля.Я использовал острый нож Xacto с несколькими световыми проходами. Я не прорезаю полностью. Вместо этого я беру конец и разрезаю оболочку кабеля по линии разреза.
- Снимите изоляцию примерно на 1/4 дюйма с каждого зеленого, черного и белого проводов.
- Затем подключите зеленый провод (заземление) к клемме заземления с меткой «⏚» на задней панели источника питания.
- Подключите белый провод (нейтраль) к клемме с меткой «N».
- Наконец, подключите черный провод (линию) к клемме с надписью «L»
- Дважды проверьте все ваши соединения и убедитесь, что клеммы напряжения постоянного тока свободны.
- Подключите блок питания и убедитесь, что он работает. Вы увидите, что рядом с клеммами загорится зеленый светодиод. Не прикасайтесь ни к каким клеммам!
Щелкните эту ссылку, чтобы просмотреть техническое описание MeanWell SE-200, чтобы узнать об источнике питания, который я использую. Я купил свой у Mouser на общую сумму 46,10 доллара, включая налоги и доставку. Я знаю, что вы можете получить более дешевые блоки питания, но мне всегда везло с продуктами MeanWell.
Шаг 4 — Подключите блок питания к grblShield и проверьте
Теперь, когда у вас все подключено к источнику питания, пора подключить его к grblShield.
ВНИМАНИЕ — grblShield не имеет защиты от обратной полярности. Если вы подключите напряжение питания в обратном направлении, вы разрушите свой grblShield, и вам придется отправить его обратно для замены.
- С помощью мультиметра проверьте выходное напряжение и полярность источника питания. Вы должны увидеть примерно 24 вольта.
- Отключите блок питания.
- Подключите клемму V + источника питания к винтовой клемме Vmot на grblShield.Я использовал многожильный провод 16 AWG.
- Подключите клемму V- на источнике питания к винтовой клемме GND на grblShield.
- Убедитесь, что провода между источником питания и grblShield правильно подключены. Я не хочу, чтобы вас тормозили отправкой grblShield обратно в Synthetos.
- Подключите блок питания и убедитесь, что grblShield работает. Вы увидите, что рядом с винтовыми клеммами загорится синий светодиод. Опять же, не трогайте никакие клеммы!
- Отключите блок питания.
Щелкните здесь, чтобы получить дополнительные сведения о начале работы с grblShield.
Шаг 5. Подключите grblShield к Arduino
Если у вас установлена последняя версия Arduino UNO rev 3 (R3), вы можете просто подключить Arduino к grblShield. Версия Arduino R3 имеет 8-контактный разъем в качестве источника питания. Если у вас R3, просто переходите к шагу 6.
Однако, если вы похожи на меня и у вас более старая Arduino, вам нужно будет сделать быстрый мод для grblShield, который включает вырезание следа на печатной плате и добавление перемычки.Звучит устрашающе, но это займет всего несколько минут. В следующем процессе рассматриваются модификации, необходимые, если у вас более старая версия Arduino.
- Отключите все питание от grblShield.
- Обрежьте крайний левый след в секции перемычки питания J11 с помощью острого ножа x-acto. См. Изображение ниже. Секция перемычки питания представляет собой расположение 2 × 3 металлических сквозных отверстий в печатной плате под приводом шагового двигателя по оси Z.
- Добавьте перемычку к крайней правой паре металлических сквозных отверстий в секции перемычки питания J11.Они наиболее близки к маркировке J5 и J6 на печатной плате. Я использовал обрезок провода, отрезанный от резистора, и припаял перемычку на место.
Щелкните здесь для дополнительных настроек логической мощности на grblShield.
Перемещение перемычки питания grblShield для установки более старых Arduinos.
Шаг 6 — Проверьте соединение
Теперь пора проверить, хорошо ли работают вместе ваш компьютер, Arduino и grblShield.
- Подключите кабель USB к Arduino и ПК
- Подключите блок питания к grblShield
- Включите компьютер и запустите универсальный отправитель gCode, щелкнув ярлык на рабочем столе
- Установите скорость передачи данных в универсальном отправителе gCode на 115200.(Обратите внимание, если вы используете grbl версии v0.8 или ниже, установите скорость передачи на 9600.) См. Рисунок ниже.
- Затем выберите COM-порт, используемый для подключения к Arduino. если вы не знаете, какой из них, попробуйте первый из перечисленных COM-портов.
- Нажмите кнопку «Открыть» рядом с полем выбора скорости передачи.
- Если все системы отключены, вы увидите приветственное сообщение в окне консоли «grbl v0.9 [‘ $ ’for help]».
- Если вы получили приветственное сообщение, отключите источник питания и отсоедините Arduino от ПК.
Выберите скорость передачи в раскрывающемся меню. Для grbl версии v0.9 используйте 115200.
Шаг 7. Подключите шаговые двигатели
Следующий процесс относится к шаговым двигателям на 425 унций, поставляемым Automation Technologies Inc.
Это 8-проводные шаговые двигатели. Но подождите, у grblShield есть только 4 точки подключения для каждого двигателя. Эти шаговые двигатели имеют 4 катушки. Нам нужно настроить эти катушки таким образом, чтобы в итоге получилось 4 точки подключения.Существует множество данных, описывающих оптимальный способ подключения шагового двигателя. Я выбрал биполярную (параллельную) конфигурацию. Это позволит мне максимально использовать возможности этих двигателей. В этой конфигурации моторы потребляют 2,8 А (чуть выше 2,5 рейтинга grblShield), но, судя по информации от Synthetos, они работают очень хорошо.
Двигатели имеют следующие 8 проводов, каждый из которых имеет цветовую маркировку:
.Синий / Белый, Синий, Красный / Белый, Красный, Зеленый / Белый, Зеленый, Черный / Белый, Черный
Вы можете использовать лист данных, чтобы подтвердить следующую схему подключения.
A + = синий / белый и красный / белый
A — = синий и красный
B + = зеленый / белый и черный / белый
B- = зеленый и черный
Я скрутил пары проводов перед установкой в grblShield. В клеммных зажимах используются крошечные винты с плоской головкой, и вам понадобится хорошая небольшая отвертка.
- Убедитесь, что питание между grblShield и Arduino отключено. Сюда входит USB-кабель, соединяющий ПК с Arduino.Перед подключением шаговых двигателей убедитесь, что он снят.
- Подключите пары проводов к клеммам шагового двигателя оси X в указанном выше порядке. См. Рисунок ниже
Порядок подключения шагового двигателя.
Шаг 8 — Проверьте шаговый двигатель
А теперь давайте соберем все вместе и пошумим!
- Найдите потенциометр ограничения тока на grblShield для оси, которую вы используете для тестирования. Я использовал ось x.
- Осторожно поверните потенциометр против часовой стрелки до упора. Принудительное нажатие потенциометров за упор приведет к неработоспособности оси.
- Включите компьютер и запустите универсальный отправитель gCode, щелкнув ярлык на рабочем столе.
- Подключите блок питания к grblShield.
- Затем подключите кабель USB к Arduino и ПК.
- Убедитесь, что ваш компьютер обращается к grblShield, проверив приветственное сообщение в окне консоли «grbl v0.9 [‘$’ за помощь] ».
- Затем введите «G0 X1000» в командном окне. Это команда g-кода, которая сообщает оси x двигаться на 1000 мм от ее текущего положения. (Для grblShield по умолчанию используются миллиметры, но они могут быть изменены на дюймы, если вам удобнее работать с этой системой единиц.)
- Осторожно поверните потенциометр по часовой стрелке, пока двигатель не начнет вращаться. Продолжайте движение, пока двигатель не заработает ровно. Обратите внимание, что вам, вероятно, придется повторить этот шаг после того, как в машине будут установлены шаговые двигатели.
- Отправьте еще несколько команд g-кода или поиграйте с кнопками на вкладке «Управление машиной».
У хороших ребят из Synthetos есть хорошая начальная страница для grblShield здесь.
Последние мысли
Ого, это куча информации, которую нужно переварить. Если у вас есть какие-либо вопросы или вы застряли в пути, напишите мне на почту [email protected]
Не забудьте скачать Quick Start Guide здесь. Если вы визуальный человек, это больше ваш стиль.
Удачи в вашем проекте. Я хотел бы услышать, что вы создаете с помощью своего DIY-контроллера с ЧПУ. Оставьте небольшую заметку в комментариях ниже.
Спасибо за прочтение. До следующего раза… Тим
Создайте свой собственный контроллер ЧПУ
Введение
В этой статье я рассмотрю весь процесс сборки автономного контроллера ЧПУ, который я сделал для своего маршрутизатора с ЧПУ 6040. Несмотря на то, что он сделан специально для моего маршрутизатора, большинство описываемых предметов должны быть применимы к любому станку с ЧПУ для личного использования.Подробно рассказывается о подготовке корпуса, а также о том, почему я использовал определенные электрические компоненты, и я буду включать все ошибки, которые я допустил на этом пути, чтобы, надеюсь, не дать другим людям совершить те же ошибки.
Последнее обновление статьи: 15 апреля 2021 г. (ссылка на видео, часть 3, новая электрическая схема в PDF и добавленные части в спецификацию)
Обратите внимание:
— Экранированный кабель, проходящий через металлические (GX16) штекеры: желательно обернуть экран вокруг кабеля, чтобы он соприкасался с разъемом (GX16).Никакой дополнительной булавки не требуется. В этом случае разъем можно заземлить через металлическую монтажную пластину или полностью металлический корпус.
— Рассмотрите возможность использования металлического корпуса и размещения частотно-регулируемого привода в отдельном металлическом корпусе для защиты от электромагнитных помех и упрощения заземления.
— Проверьте номинальную мощность для ваших конкретных компонентов (частотно-регулируемый привод и источник питания), чтобы узнать, какой тип сетевого разъема и предохранителя вам следует использовать. Разъемы C14 рассчитаны на максимум 10 ампер при 250 В переменного тока. Одна из возможных альтернатив — не использовать разъем, а использовать кабельный ввод и предохранитель соответствующего номинала внутри коробки или держателя предохранителя, установленного на панели.Также подумайте о розетке CEE, если номинал вашей сетевой розетки не подходит для ваших компонентов.
— Использование экранированных кабелей для шаговых двигателей также снаружи шкафа снижает вероятность возникновения электромагнитных помех.
Эта сборка также описана в 3 видеороликах, ссылки на которые приведены ниже. В дополнение к инструкциям по сборке в этих видеороликах в этой статье также представлена дополнительная информация, такая как параметры программного обеспечения и настройки для контроллера DDCS и VFD.
Часть 1
Часть 2
Около 5 лет назад я купил маршрутизатор 6040 у китайской компании YooCNC, которая теперь носит имя OmioCNC.Управление машиной осуществляется МАЧ4 через USB-соединение.
Внутренняя интерфейсная плата заботится только о связи с ПК и передает команды от MACh4 шаговым двигателям и другим компонентам. Хотя это нормально работает, я предпочитаю использовать автономный контроллер ЧПУ. Это избавляет от необходимости постоянно подключать ПК к ЧПУ. Также, если в какой-либо момент произойдет сбой USB-соединения, у вас могут возникнуть проблемы. Время от времени я испытывал потерянные шаги по оси X, которые, я надеюсь, также будут устранены с новым контроллером.Наконец, беспроводной контроллер имеет несколько хороших функций, но есть значительная задержка между входом в MPG и перемещениями осей.
Существующая конфигурация: ноутбук с MACh4 и контроллер с интерфейсом USBПосле некоторых поисков на Aliexpress я решил выбрать контроллер DDCSV3.1. Я купил 4-осевую версию, так как я также хотел модернизировать свой маршрутизатор с поворотной осью. Хотя существует множество альтернатив, я выбрал этот контроллер, поскольку он казался простым в использовании, имел все необходимые мне функции и, что, возможно, самое главное, для него есть хорошее руководство на английском языке.
Корпус
Контроллер DDCS не помещается в исходный блок управления, поэтому мне также пришлось купить новый корпус. Сначала я купил пластиковый, который был ненамного больше оригинального контроллера. Однако после попытки поместить компоненты в новую коробку быстро стало очевидно, что лучше не экономить на размере корпуса для контроллера DYI. Корпус большего размера значительно облегчает вашу жизнь при сборке всего.Поэтому я купил еще один корпус (Famatel) размером 400 на 500 на 175 мм всего за 85 евро, —
.
Я предпочитаю пластиковый корпус, потому что он дешевле и проще в эксплуатации, чем корпус из листового металла.
Утилизация деталей старого контроллера
Осторожно:
Работа с сетевым напряжением опасна. Это может убить тебя.
Всегда отключайте устройство от сети перед открытием корпуса.
Поскольку я больше не собирался использовать старый контроллер, я разобрал его, чтобы спасти любые части, которые я мог бы использовать в новой настройке.Первоначальный план состоял в том, чтобы повторно использовать блок питания, драйверы шагового двигателя и частотно-регулируемый привод и подключить все это к новому контроллеру DDCSV. Это значительно сэкономило бы деньги, и мне потребовалось бы только купить новые кнопки и детали для цепи безопасности. В конце концов, я также заменил драйверы шагового двигателя, но об этом позже.
Разборка старого контроллера…Разбирая старый контроллер, я пометил все провода и построил электрическую схему, чтобы помочь мне понять, как все было подключено, чтобы было легче подключить новый контроллер.
Ссылка ниже представляет собой файл PDF, содержащий дополнительную информацию для этой сборки, включая инструкции по подключению и параметры программного обеспечения:
PDF включает:
- Схема подключения старого контроллера YooCNC
- Схема подключения нового контроллера, как описано в этой статье
- Электропроводка MPG
- Настройки параметров для VFD
- Настройки параметров для контроллера DDCS
- Подключение разъема GX16 (шаговые двигатели)
От сетевой вилки один из выводов идет к главному выключателю питания.Он соединен последовательно с аварийной остановкой, поэтому вы можете отключить питание всей системы в случае возникновения чрезвычайной ситуации. За ним находится отдельный выключатель питания для частотно-регулируемого привода, поэтому вы можете оставить его выключенным, даже когда контроллер работает. Электропитание частотно-регулируемого привода проходит через фильтр электромагнитных помех для уменьшения электромагнитных помех. Если вы не знакомы с термином VFD: он означает частотно-регулируемый привод. Он приводит в движение двигатель шпинделя и позволяет контролировать скорость вращения шпинделя.Плата интерфейса Mach4 отправляет сигналы на VDF как для включения / выключения, так и для желаемого числа оборотов в минуту. Провода, подключенные к клеммам U / V / W, выходят на двигатель шпинделя. Плата интерфейса Mach4 также подает сигналы на драйверы шагового двигателя. Сами драйверы превращают эти сигналы в сильноточные сигналы, которые приводят в действие настоящие шаговые двигатели. Драйверы шагового двигателя питаются от источника питания 40 В. Я расскажу более подробно о том, как подключить драйверы VFD и шагового двигателя ниже.
Я вынул частотно-регулируемый привод с сетевым кабелем.Помимо фильтра электромагнитных помех, он также включает ферритовое кольцо a для уменьшения электромагнитных помех. Все это будет перенесено на новый контроллер. ЧРП поставляется с собственной панелью управления, которую можно подключить к самому ЧРП или установить снаружи блока управления, чтобы иметь доступ во время работы машины.
Драйверы размещаются между контроллером ЧПУ и шаговыми двигателями для управления двигателями с заданным током и количеством импульсов на оборот.Подробнее о настройках этих шаговых драйверов ниже. Единственное, что осталось в старом блоке управления, это интерфейсная карта MACh4, которая больше не нужна.
Схема подключения нового контроллера
Графический макет см. В файле PDF, ссылка на который приведена в разделе выше. Схема подключения нового контроллера немного отличается от старого. В основном это связано с добавлением цепи безопасности. Что мне не понравилось на старом контроллере, так это хлипкая кнопка аварийного останова и переключатели сетевого питания и частотно-регулируемого привода.Эти 2 переключателя были размещены непосредственно на линии электропитания. Это означает, что если машина включена, и у вас отключение электроэнергии, вы можете оказаться в опасной ситуации, если забудете выключить машину до того, как снова будет подано питание. Более распространенным решением на промышленных машинах является использование контактора для переключения питания от сети. Контактор действует как липкое реле.
Siemens 3RT2016-1BB41 КонтакторКонтактор включается нажатием кнопки ВКЛ и отключается нажатием кнопки ВЫКЛ.Обе кнопки являются мгновенными контактами. Хитрость этой схемы заключается в том, что контактор сохраняет желаемое состояние даже после отпускания любой из этих кнопок. Это достигается за счет использования вспомогательных контактов. При нажатии кнопки ON контактор замыкает не только главные контакты цепи большой мощности, но также замыкает вспомогательный контакт. Когда это происходит, контактор удерживается на месте током, протекающим через вспомогательный контакт, который он только что подключил. Таким образом, даже после отпускания кнопки ВКЛ контактор остается включенным.Кнопка ВЫКЛ — это нормально замкнутый контакт. Когда эта кнопка нажата, цепь разрывается, и контактор отключается, а также остается в этом положении даже после отпускания кнопки.
Кнопка аварийной остановки может быть подключена последовательно с кнопкой ВЫКЛ и будет действовать таким же образом. Если нажать кнопку аварийного останова, контактор отключается и остается выключенным, даже если аварийный останов отпущен. Затем вы должны нажать кнопку ON в качестве дополнительного действия, чтобы снова включить машину. Это типичная функция безопасности, поскольку отключение только аварийного останова не должно быть единственным действием, необходимым для повторного включения машины.Для моего нового контроллера у меня есть E-stop, интегрированный в MPG, который заставит контроллер останавливать все моторы и шпиндель и переходит в режим E-stop, где вы не можете ничего делать, пока не отпустите E-stop, а затем нажмите кнопку кнопка сброса. Я подключу отдельный аварийный останов последовательно с кнопкой ВЫКЛ контактора, так что этот аварийный останов фактически отключит питание шаговых драйверов и частотно-регулируемого привода. Результат такой же, как и с программным E-stop, запускаемым MPG, но в этом случае сетевое питание отключается от компонентов, что является немного более грубым решением, но я считаю, что это добавляет дополнительный уровень безопасности.Поскольку контроллер ЧПУ не включен в цепь, переключаемую контактором, контроллер ЧПУ останется включенным при нажатии кнопки аварийного останова.
В случае сбоя питания контактор отключается, поэтому при возобновлении подачи питания машина остается выключенной. Если машина снова включится после восстановления подачи электроэнергии, это будет серьезной угрозой безопасности.
Компоненты для нового контроллера
Спецификация материалов: (Пункты, выделенные полужирным шрифтом , были добавлены позже, в видео-части 3)
- Корпус 500x400x175 мм — Famatel 39145
- DDCS4 V3.1 контроллер ЧПУ, включая MPG
- Nowforever VFD E100, 2,2 кВт
- Шаговый драйвер — DM556 (Amazon)
- Шаговый драйвер с замкнутым контуром, включая Nema 23 Драйвер шагового двигателя 2,2 нм серводвигатель 57HSE2.2N + HBS57 Гибридный шаг с замкнутым контуром мотор (Aliexpress)
- Сетевой разъем K&B 42R321121 (Conrad 736916)
- Сетевой разъем питания MENNEKES 11011
- 80мм вентилятор. Noctua NF-A8 FLX (12 В, к сожалению, недоступен для 24 В)
- Решетка вентилятора LFG80-45 SEPA (Conrad 189516)
- Блок распределения кабеля PTFIX синий, Phoenix Contact 3002761
- Блок распределения кабеля PTFIX серый, Phoenix Contact 3002757
- Кабельный распределительный блок PTFIX Желтый / зеленый, Phoenix Contact 10
- Переходник для DIN-рейки PTFIX, Phoenix Contact 3274054
- Кабельная стяжка Phoenix Contact WT-BASE LS HF 4 (Conrad 1832324)
- Кабель для шаговых двигателей: Lapp 0034704 ( LIYCY, гибкий, экранированный, ПВХ 4 × 0.75sq_mm)
- Сетевой выключатель Siemens — 3ld2203-1tl53
- Контактор Siemens — 3RT2016-1BB41
- Диод ограничителя перенапряжения Siemens 3RT2916-1DG00
- Mean Well 24V Блок питания
- MDR-2010 Источник питания LRS-35
- Источник питания Mean Well 40 В S-400-40
- RCNUN Преобразователь постоянного тока в постоянный с 24 на 12 RC24121R5
- Светодиод EATON — светодиод m22 230 Вт
- Монтажный инструмент EATON — m22 мс
- EATON обычно блок разомкнутых контактов — m22 k10
- Блок нормально замкнутых контактов EATON — m22 k01
- EATON E-Stop — M22-PV / KC02 / IY
- Селекторный переключатель EATON — m22 wrlk w
- Кнопка включения / выключения EATON — M22- DDL-GR-X1-X0
- 4 th Axis K11 80мм 3-кулачковый патрон — Aliexpress, RATTM Motor
Я использовал блок питания, восстановленный от старого контроллера.Он имеет выходное напряжение 40 В при максимальном 10 А. Этого должно быть достаточно для 3 шаговых двигателей NEMA 23, каждый из которых рассчитан на ток 3 А. Поскольку я теперь также добавляю в систему ось 4 -й , она немного жестче. Но не все двигатели одновременно потребляют максимальный ток. Кроме того, как я понял, существует практическое правило, согласно которому вы можете использовать источник питания, рассчитанный на 2/3 фазного тока шагового двигателя. Таким образом, для 4 двигателей, рассчитанных на 3 А, потребуется блок питания на 8 А.Если у меня не возникнут какие-либо проблемы со стабильностью, я сохраню этот блок питания.
Два новых источника питания на DIN-рейку используются для контроллера DDCS и других компонентов. Для DDCS требуется 2 отдельных источника питания, один для питания устройства, а другой для ввода-вывода. Это снижает вероятность электрических помех.
Новый E-stop, заменяющий хлипкий E-stop от оригинального контроллера, показан ниже. Это автономное устройство, поэтому его можно установить рядом с машиной.E-stop содержит 2 нормально замкнутых контакта, соединенных последовательно для резервирования.
Внешний аварийный останов: EATON M22-PV / KC02 / IYСетевой выключатель, который я купил специально для этого проекта, смехотворно завышен как по физическим размерам, так и по техническим характеристикам. Он рассчитан на 32 А, что намного больше, чем этот маленький фрезерный станок с ЧПУ когда-либо потребляет от сети. Так что это немного чересчур, но поскольку я уже заказал его, и то, что он слишком тяжелый и негабаритный, не имеет значения, я все равно решил его использовать.
Выключатель-разъединитель; Сименс 3LD2203-1TL53Переключатели, которые я выбрал для нового контроллера, являются частью серии EATON M22. Я выбрал их потому, что они не очень дорогие, имеют модульную конструкцию и в этой серии доступно множество различных переключателей. Я использовал двойной переключатель ВКЛ / ВЫКЛ со встроенным светодиодом и селекторный переключатель с подсветкой для отдельного включения ЧРП. Под кнопками или переключателями вы можете разместить нормально разомкнутые контакты, нормально замкнутые контакты, светодиод или любую их комбинацию.Для крепления переключателей к панели используется отдельный инструмент, но вы также можете затянуть их вручную.
VFD от старого контроллера — это устройство Nowforever E100. Как упоминалось ранее, это будет повторно использовано. На данный момент я оставлю панель в самом VFD, вместо того, чтобы размещать ее снаружи. При необходимости всегда есть возможность сделать это позже. Этот VFD — более старая модель, которая больше не продается.
Наиболее важным компонентом этой сборки является автономный контроллер ЧПУ DDCS V3.1.Он имеет компактный форм-фактор и относительно небольшой 5-дюймовый дисплей, который, на мой взгляд, вполне подходит для данного приложения.
DDCS4 V3.1 Контроллер ЧПУЭтот контроллер все еще доступен, но к тому времени, когда я завершил сборку, теперь также доступна более новая модель, DDCS Expert. У этого устройства есть некоторые более продвинутые функции, больший экран, а также больший ценник. Это зависит от того, нужны ли вам дополнительные функции, чтобы оправдать повышение цены. На данный момент я доволен DDCS V3.1.
Ряд кнопок выполняет несколько функций в зависимости от того, в каком меню вы находитесь. На задней панели находится своего рода отрывная плата, которая непосредственно устанавливается на большой разъем sub-D. Здесь вы обеспечиваете питание устройства и имеете все входы и выходы. Внизу находится отдельный разъем для внешних кнопок запуска, паузы и остановки. Это необязательно. В центре у нас есть 15-контактный разъем Sub-D для MPG.
Последний порт на контроллере ЧПУ — это порт USB.Провод снабжен разъемом USB для монтажа на панель. Вы можете разместить его в удобном месте и загружать программы в контроллер с обычного USB-накопителя.
Это MPG для контроллера:
Если вы не знакомы с этим термином; MPG — это ручной генератор импульсов. Они используются для ручного перемещения осей на станке и обычно содержат маховик и переключатели для оси и множителя шага. Эта модель очень проста, но имеет все необходимые функции для ручного толчка тренажера.Поскольку импульсы отправляются непосредственно на контроллер ЧПУ, реакция станка на ваш ввод от маховика кажется очень прямой. С беспроводным MPG от старой системы с контроллером MACh4 и выходной платой USB, я всегда чувствовал, что есть некоторая задержка. Если вы покупаете этот тип контроллера на Aliexpress, вам, как правило, придется самостоятельно припаять его к разъему.
Драйверы шагового двигателя
На шаговых драйверах, которые я спас от старого контроллера, есть торговая марка YOOCNC, но они похожи на шаговые драйверы от многих других брендов с такими же характеристиками и форм-фактором, поэтому они, вероятно, являются OEM-частями и могут быть похожи на шаговые драйверы. которые просто заклеймены по-другому.
Самое замечательное в драйверах этого типа то, что настройки напечатаны на боковой стороне устройства, поэтому вам не нужно искать руководство, чтобы увидеть, как они настроены. Драйверы шагового двигателя рассчитаны на 5,6 А, но на самом деле они установлены на 2,7 А, что соответствует шаговым двигателям на 3 А, используемым в моем маршрутизаторе с ЧПУ.
Микрошаговый режим установлен на 2000 импульсов на оборот. Типичный шаговый двигатель имеет 200 шагов на оборот. Если мы разделим 2000 на 200, мы получим 10 микрошагов на полный шаг.Микрошаговый режим используется для более плавной работы шаговых двигателей.
Соединения на драйвере слева направо:
- 4-контактный разъем, который обеспечивает ступеньки при сильном токе для привода двигателя.
- Входной разъем питания: обеспечивает питание шагового драйвера. Устройство может работать от 24 В до 50 В. В этом случае он питается от источника питания 40 В, что удобно между этими верхними и нижними пределами.
- DIP-переключатель для настройки различных параметров, как упоминалось ранее.
- Разъем для включения или отключения шагового драйвера. Это может быть использовано, например, для выключения агрегата в случае сбоя или тревоги. Я не буду использовать эту функцию. Если контакты разъема оставлены открытыми, устройство включено.
- 4-х контактный разъем. Предоставляет сигнал для шагового драйвера, который сообщает шаговому драйверу, на сколько шагов нужно переместить двигатель и в каком направлении. Он подключен к выходному порту на контроллере ЧПУ, который генерирует ступенчатый сигнал.
Я купил драйверы шагового двигателя в Интернете на Amazon, но вы можете получить их во многих интернет-магазинах, включая известные китайские источники.Убедитесь, что у драйверов, которые вы получаете, есть винтовые клеммы, чтобы не обжимать разъемы. У меня было много проблем с разъемами на других устройствах, поэтому я решил заменить их все на новые с винтовыми клеммами.
Макет
Пришло время разобраться с компоновкой нового шкафа контроллера, что оказалось сложнее, чем я думал. Существует множество различных способов размещения компонентов внутри шкафа, каждый из которых имеет свои плюсы и минусы. Окончательно остановился на такой раскладке:
Он имеет шаговые драйверы в верхней части шкафа, рядом с разъемами для подключения двигателей.Я разместил частотно-регулируемый привод на противоположном конце шкафа, поскольку это самый большой источник электромагнитных помех и, следовательно, у меня будет наименьшая вероятность того, что он испортит сигналы к шаговым драйверам и от них. На боковой стенке шкафа я разместил выключатель питания, вилку для подключения к сети и 2 входных отверстия для воздуха. Впускные отверстия расположены на противоположной стороне от вентилятора, чтобы максимально увеличить поток воздуха через электронные компоненты.
Кнопки расположены на левой стороне контроллера, так как мне показалось, что это наиболее естественное место.Например, кнопки Haas расположены на этой стороне, и я уверен, что для этого есть хорошая эргономическая причина.
Для просверливания большинства отверстий использовалось ступенчатое сверло. Эти ступенчатые сверла очень хорошо работают с тонким материалом. 2.Он должен соответствовать размеру 18 Американского стандарта калибра проводов (AWG).
Припаивание разъемов GX16 к экранированному проводу.Разъем питания от сети будет расположен с левой стороны. Когда шкаф находится в вертикальном положении, он будет ближе к низу. Я планирую подвесить контроллер вертикально под столом для фрезерного станка с ЧПУ.
Для воздухозаборников и вентилятора мне нужно было вырезать отверстия диаметром 80 мм. Для этого я использовал кольцевую пилу. Скорость вращения должна быть достаточно низкой, чтобы материал не плавился.У меня были проблемы с застреванием, поэтому я прибегал к попеременному давлению, чтобы убедиться, что пластик не слишком нагревается при резке.
Отверстие под контроллер DDCSV проделывается в основном мини-ножовкой. Похоже, это большая работа, но в реальном времени на вырезание отверстия потребовалось всего около 10 минут. Чтобы удалить закругленные углы, образовавшиеся ступенчатым сверлом, потребовалась некоторая опила.
Такой же подход был использован с прямоугольным отверстием для разъема сетевого питания. Я был немного осторожен с размерами, когда вырезал отверстие ножовкой.Для увеличения размера кармана легче сделать дополнительную подпиливку, чем сделать его меньше.
Сетевой разъем фиксируется винтами M3. Я использую стопорные гайки с нейлоновой вставкой повсюду в шкафу контроллера, чтобы предотвратить ослабление металлической гайки и возможное короткое замыкание. В сетевой разъем встроен держатель предохранителя. Старый контроллер ЧПУ имел быстродействующий предохранитель на 8А. Я использую здесь то же самое. 8 ампер при напряжении 230 В составят около 1800 Вт.Это может показаться немного трудным, поскольку шпиндель рассчитан на 1500 Вт, а блок питания на 400 Вт, но он работал без проблем с предохранителем на 8 А в старом контроллере, поэтому я буду использовать его. Я бы предпочел предохранитель, который перегорает слишком рано, чем предохранитель, который перегорает слишком поздно
В шкафу есть вентиляционные отверстия: 2 для входа и 1 для выхода воздуха. За выпускным отверстием установлен вентилятор, который будет выталкивать тепло из шкафа, а над входными отверстиями расположены крышки вентиляционных отверстий с основным пылевым фильтром.Это очень грубый фильтр, но, по крайней мере, он не пропускает более крупные частицы пыли.
Подключение вентилятора
Вентилятор на старом контроллере работал очень громко, и я предпочитаю максимально снизить уровень шума, когда маршрутизатор не работает. Поэтому я выбрал 80-мм вентилятор Noctua (для этого нужен блок питания 12 В или понижающий преобразователь с 24 В на 12 В). Он имеет все виды функций для снижения уровня шума, в том числе резиновые опоры и специально разработанные лопасти вентилятора для предотвращения турбулентного потока воздуха.Поставляется с 3 разными кабелями. В зависимости от того, какой кабель вы выберете, вы можете запустить вентилятор на низкой, средней или высокой скорости. Конечно, с самой высокой скоростью, обеспечивающей максимальный воздушный поток, но при этом наименее тихой. В итоге я выбрал низкую настройку. Кажется, что для этого приложения создается достаточный воздушный поток. Я пока иду с интуицией. Если позже я узнаю, что воздух, выходящий из шкафа, слишком горячий, я всегда могу установить более высокое значение.
Я не использую резиновые крепления вентилятора в этом случае, потому что там, где находится вентилятор, их будет сложно установить.Насколько я могу судить, использование шурупов не добавляет значительных вибраций или шума.
Я подключаю вентилятор к небольшому источнику питания на 24 В. Так как я разрезал один из кабелей адаптера, который мне не понадобится, пополам и поместил несколько разъемов на концы, чтобы я мог подключить его к источнику питания. С такой настройкой я могу подключить вентилятор напрямую на полную мощность или вставить между ними один из переходных кабелей с низким уровнем шума, просто отсоединив разъем. Из вентилятора выходят 3 провода: красный и черный для питания и желтый провод для управления частотой вращения.Я не использую эту функцию, поэтому отрезал желтый провод.
Для каждого адаптера уровень звука снижается примерно на 2 децибела, всего на 4 децибела при использовании адаптера самой низкой скорости. Поскольку удвоение звуковой энергии составляет 3 децибела, снижение уровня звука с помощью адаптеров является очень значительным.
На рисунке ниже показан небольшой блок питания на 24 В, который я купил специально для цепи безопасности. Это малая мощность, так как она используется только для активации контактора. Он будет включаться напрямую от сетевого выключателя, поэтому его можно фактически использовать для питания контактора.
Форм-фактор этого, на мой взгляд, намного лучше, чем у другого небольшого блока питания. Он меньше по размеру, к контактам нельзя дотронуться, крепится на DIN-рейку. Оглядываясь назад, я также должен был купить версию на DIN-рейку для другого небольшого блока питания, но, поскольку он уже был установлен, я решил оставить все как есть. DDCS находится на отдельном источнике питания, так как я хочу предотвратить скачок напряжения при отключении контактора, который может повлиять на электронику в DDCS.Другое (возможно, лучшее) решение — добавить к контактору защиту от перенапряжения. Я нашел видео, посвященное этой теме, в котором подробно объясняется это явление и различные способы его устранения.
https://www.youtube.com/watch?v=Ij0B-2gxH7w
Я хотел использовать гибкий провод для соединения между различными высоковольтными компонентами. Это, вероятно, не лучшая практика, но я спас провод от использованного шнура питания 230 В. Это означает, что я использую коричневые и синие провода для высоковольтных соединений.Это не соответствует стандартам EN, но имейте в виду, что это хобби-проект и не предназначен для коммерческого использования. Насколько я знаю, вы должны использовать черный для сетевого напряжения, но поскольку я уже использую черный в качестве нейтрального провода для цепей малой мощности, я не хотел путать их. Поэтому, пожалуйста, не используйте эту статью, чтобы попытаться выяснить, какой цвет провода вы должны использовать для своего проекта, поскольку то, что вы видите здесь, не соответствует ни одному стандарту.
Я использовал соответствующие обжимные разъемы, чтобы можно было подключить провода к сетевому разъему и другим компонентам.
Я попытался обжать разъемы на проводах для шаговых приводов, которые я спас от старых контроллеров. К сожалению, у них не было винтовых клемм для проводов, что намного проще, если вы делаете свой собственный контроллер. Я сделал несколько попыток сделать соединители с надежными соединениями, но у меня были одна неудача за другой. Возможно, я использую не те плоскогубцы из-за отсутствия навыков, но мне не удалось заставить разъемы надежно зажимать провода. Прежде чем это осознать, я на самом деле закончил все провода и даже начал устанавливать их в шкаф.Я довольно легко смог вручную вытащить провода из разъемов. Поэтому я решил пойти на другое решение. Поскольку вы можете купить драйверы шагового двигателя менее чем за 20 евро, я заказал несколько новых и снова начал процесс подключения. Новые шаговые драйверы имеют винтовые клеммные колодки, которые при необходимости также можно снять. На рисунке ниже показаны шаговые драйверы после подключения всех проводов, слева направо: шаговый сигнальный кабель, питание 40 В и провода, ведущие к шаговым двигателям.
USB-кабель
Разъем USB будет размещен в верхнем левом углу передней панели. Кабель позволяет разместить разъем USB в любом месте. Поскольку соединитель имеет прямоугольную форму, это снова потребовало некоторой обрезки и опиливания.
кабель MPG
Для MPG необходим кабель, идущий от задней части контроллера к разъему на внешней стороне шкафа. В данном случае верхняя панель. К сожалению, он не входит в комплект поставки контроллера.Я выбрал 15-контактный разъем sub-D, который я вручную припаял к кабелю. И, конечно же, еще немного порезки и опиловки. Хотелось бы установить коннектор на панель изнутри, но пластиковый корпус довольно толстый, поэтому его пришлось установить снаружи. Менее красиво, но работает.
Для плоского кабеля я распечатал кабельный зажим, который я разработал в Fusion 360. Он основан на дизайне, который я нашел на Thingiverse, но теперь, когда я хочу сослаться на него, я больше не могу найти его среди множества дизайнов, которые у людей есть. опубликовал.Я загрузил свою версию этого клипа на grabCAD. Его можно скачать по следующей ссылке:
https://grabcad.com/library/flat-cable-clip-1
Зажим для плоского кабеля, крепящийся к внутренней части шкафа с помощью двусторонней лентыВ местном магазине электроники я также купил красивый разъем, который соединяется с каждым выводом провода, разрезая его. К сожалению, все оказалось не так просто. Просто казалось, что он не закрывается должным образом. При ближайшем рассмотрении выяснилось, что у разъема другой шаг, чем у плоского кабеля, который я использовал.Здесь вы можете увидеть это в сравнении с каким-то старым плоским кабелем, который у меня лежал. Чтобы предотвратить еще одну поездку в город только за новым разъемом, я припаял и эту сторону.
В старой ситуации мой VFD управляется через коммутационную плату MACh4. Я буду управлять частотно-регулируемым приводом таким же образом, используя входной сигнал 0-10 В для управления скоростью шпинделя. На контроллере DDCS и VFD я указываю, что при 0 В шпиндель должен остановиться, а при 10 В скорость вращения шпинделя должна быть максимальной для шпинделя, в данном случае 24.000об / мин. Любое другое напряжение между ними установит шпиндель на соответствующую скорость шпинделя. Например, если моя программа ЧПУ имеет команду скорости шпинделя на 12.000 об / мин, контроллер DDCS выдаст 5 В, и тогда частотно-регулируемый привод будет знать, что он должен контролировать скорость шпинделя, чтобы она составляла 12.000 об / мин.
Существует также сигнал пуска-останова, подключенный к VFD, поэтому вы можете запустить шпиндель из вашей NC-программы с помощью команды M03. Контроллер также предлагает возможность изменять направление шпинделя, но поскольку я использую только направление шпинделя по часовой стрелке, просто возможность включить или выключить его — это нормально.
Подключения следующие:
- R, S : 230V
- U, V, W : шпиндель
- COM : он подключен к отрицательной общей клемме на контроллере DDSCV. Это необходимо для обеспечения того, чтобы отрицательное общее соединение было на одном уровне напряжения между контроллером и частотно-регулируемым приводом, а не было «плавающим» напряжением.
- AIN1 : вход 0-10 В для управления скоростью шпинделя. Убедитесь, что перемычка AIN1 слева от клеммной колодки установлена на 10 В, а НЕ на 20 мА.
- X1 : включить или выключить шпиндель. Открытый выключен, соединение с землей включено.
Я также просмотрел все настройки параметров VFD, но не изменил ни одного из них. В PDF-файле, ссылка на который находится в верхней части статьи, перечислены все настройки параметров для всех, кому это интересно.
Распределительные блоки PTFIX
Когда вся проводка была завершена, мне не совсем понравилось сочетание дешевых клеммных колодок и отдельных соединителей.Поэтому я заменил их двумя комплектами распределительных блоков PTFIX. Один комплект подключен к главному выключателю питания, а другой — под напряжением только при включенном контакторе. Я выбрал серию PTFIX, потому что они компактны и очень просты в использовании. Отдельные блоки можно соединить вместе. Затем набор блоков можно установить на крепежную рейку DIN, просто вставив их внутрь.
Распределительные блоки PTFIX, установленные на крепление для DIN-рейкиСуществуют также отдельные крепления для DIN-рейки, если вы хотите, чтобы блоки были установлены параллельно DIN-рейке, но они занимают больше места и требуют использования проводников, а также торцевых крышек.
Хорошо использовать кабельные каналы между компонентами, чтобы получить максимально чистый вид и упростить установку проводов, но для этого потребуется корпус еще большего размера, поэтому я просто связал провода там, где это возможно.
Зонд
Измерительный щуп для измерения длины инструмента также можно использовать с контроллером DDCS. Я использую зонд из комплекта поставки роутера.
Датчик подключен к контактам 1 и 4 контроллера DDCS. На контроллере DDCS имеется отдельный экран для мониторинга состояния входов и выходов.Я использовал это, чтобы проверить, правильно ли подключен зонд.
Тестирование датчика с помощью меню I / O на контроллере DDCSДатчик инструмента имеет зажим, который крепится к концевой фрезу. Когда инструмент опускается и касается основания зонда, происходит электрическое соединение. Контроллер DDCS имеет встроенную функцию щупа для измерения длины инструмента. Эта процедура опускает ось Z до тех пор, пока инструмент не коснется контакта, а затем устанавливает верхнюю часть материала заготовки на ноль. Вы можете ввести толщину вашего датчика в контроллер, чтобы он автоматически добавлял это значение к измерению.Обратитесь к приложенному PDF-файлу для получения информации о настройках датчика.
4 -я ось
Поскольку у меня был маршрутизатор, я всегда хотел обновить его осью 4 th , поэтому я включил и его в этот проект. Поэтому я добавил шаговый драйвер 4 th и подключил его к контроллеру DDCS. Подключение точно такое же, как для осей X, Y и Z. Настройки параметров программного обеспечения включены в файл PDF.
4-я осьКупил с алиэкспресс типовой 4-й -й комплект оси .Дешевый вариант с ременной передачей. Я надеюсь, что это обеспечивает достаточную жесткость для резки дерева и пластика, но я фактически еще не использовал его, так как Fusion360 недавно отключил многоосевую обработку по бесплатной лицензии. Я планирую запрограммировать это с помощью FreeCAD. Продолжение следует.
Я сделал кабель для 4-й оси из того же экранированного провода, который я использовал для подключения шаговых драйверов. Для перехода на кабель через корпус я использовал те же разъемы GX16, что и для остальных осей.
Проверка оборотов шпинделя
Чтобы проверить, соответствует ли частота вращения шпинделя запрограммированной скорости, я измерил скорость шпинделя при различных настройках в диапазоне от 1 до 1.000 и 24000 об / мин. Как вы можете видеть на графике, скорость вращения шпинделя очень хорошая и прямолинейная, за исключением нижнего диапазона. Это можно настроить с помощью параметров VFD, но для моей цели это определенно приемлемо.
Аварийная остановка
Я установил на контроллер внешний аварийный останов. Это очень прочный аварийный останов с 2 нормально замкнутыми переключателями, которые соединены последовательно для резервирования. Таким образом, для срабатывания аварийной остановки должен работать только один из переключателей.Он подключен таким образом, что отключает контактор и тем самым отключает питание двигателей и частотно-регулируемого привода.
Когда нажата кнопка E-stop, шаговые двигатели останавливаются почти мгновенно, а шпиндель медленно останавливается по инерции, поскольку на него больше не подается питание.
Кнопка аварийной остановки на MPG работает немного иначе. Это переводит контроллер в режим экстренной остановки. В этом случае ответ будет быстрее. Шаговые двигатели немедленно останавливаются, и шпиндель активно замедляется частотно-регулируемым приводом, поэтому он также останавливается быстрее.В качестве третьего преимущества контроллер действительно знает, что существует условие аварийной остановки, поэтому он приостанавливает выполнение программы, в то время как программа продолжает работать с внешним аварийным остановом, даже если сама машина останавливается.
Я думаю, что оба решения имеют свои преимущества, но я предпочитаю программное обеспечение E-stop. Можно повторно подключить внешний аварийный останов ко входу контроллера. Это должно дать результаты, аналогичные E-stop на MPG.
Клемма для подключения внешнего аварийного останова на контроллере DDCSДо сих пор я запустил несколько тестовых программ, и все вроде работает.
Если у вас есть какие-либо вопросы по этой сборке, дайте мне знать в разделе комментариев ниже.
Робин
Как сделать профессиональный контроллер ЧПУ MACH 3 для маршрутизатора DIY: 7 шагов
Что такое станок с ЧПУ? Это крутая штука, из которой можно делать другие очень крутые вещи!
Фрезерный станок с ЧПУ может вырезать (например, пластик или дерево) различные детали, из которых затем можно составить что-нибудь (например, робот или держатель для пива ).
В Интернете полно разных инструкций как сделать красивый / надежный / дешевый / большой / маленький самодельный фрезерный станок с ЧПУ.
Но я никогда не находил, как сделать надежный, недорогой и красивый контроллер ЧПУ. Собственно, это называется системой ЧПУ, но часто ее называют контроллером ЧПУ.
Контроллер ЧПУ — это мозг станка. Он состоит из различных электронных плат, компьютера и компьютерной программы, которая контролирует движение двигателей машины, вычисляет скорость и другое.Иногда контроллеры ЧПУ обходятся без компьютера, но я думаю, что это сильно ограничивает возможность расширения функций станка. Вдруг завтра захочешь установить на станке дополнительную ось и изготавливать более сложные детали? Без компьютера и обновления программы сделать это намного сложнее.
Есть много программ, которые могут управлять станком (MACH 3, linux CNC, KCam, CNC-D и т. Д.), Но я выбрал MACH 3 CNC, так как он очень хорошо известен, имеет большое количество пользователей и прост в установке. .
А теперь самое интересное!
Практически все используют обычные компьютеры с установленной программой. Затем сделайте отдельный корпус для электроники, драйверов, блоков питания и т. Д. Это займет много времени и места.
Я занимаюсь модернизацией станков с ЧПУ более 15 лет и знаю, что все должно быть хорошо защищено и экранировано в промышленной среде. Длинный кабель улавливал электрические импульсы и нарушал работу ЧПУ.
Я решил пойти другим путем и использовал модульный промышленный компьютер.Я заказал 10-дюймовую панель с промышленным монитором, защищенной промышленной клавиатурой и системным блоком со всеми компонентами.
У меня есть станок с 3 координатами (XYZ), но у него есть два двигателя по оси Y (по одному с каждой стороны портала).
Если вы также хотите иметь удобную и надежную систему ЧПУ MACH 3, следуйте этим инструкциям:
Двигатели с ЧПУ, драйверы ЧПУ, шаговый драйвер и электроника для фрезерных станков с ЧПУ и станков с ЧПУ
Управление ЧПУ — двигатели с ЧПУ, драйверы шаговых двигателей, мощность и многое другое…
Вот управляющая электроника ЧПУ, которая вам понадобится, чтобы заставить фрезерный станок с ЧПУ двигаться! Я предлагаю набор компонентов, как показано ниже, и отдельные продукты. Это оборудование будет иметь мощность для Наборы фрезерных станков с ЧПУ, которые я предлагаю на главной странице продаж. Эта система также позволит многие другие модификации ЧПУ.
Интерфейсы управления ЧПУ (коммутационные платы)Один из самых важных компонентов в комплекте — это контроллер ЧПУ, также называемый доской для выключения.Эта маленькая жемчужина позволяет вам для подключения вашего компьютера к шаговым двигателям с помощью USB, параллельного порта или даже Ethernet кабель.
Драйверы: Будут переводить сигналы на какие шаговые двигатели поймет и усилит переведенные сигналы, чтобы включить двигатели. Как вы можете Видите ли, на корпус нанесено множество информации для облегчения подключения.Эта забавно выглядящая металлическая деталь в полоску предназначена для отвода тепла, так как эти драйверы чипсы могут нагреваться. В частности, эти драйверы смогут принимать от 24 до 40 вольт. с током до 3 ампер. Думайте об амперах как о мышцах, а вольт как о скорости мышцы могут быть введены в двигатели. Они также позволяют микрошагу на половину, четверть, пятая, восьмая, десятая, 1/25, 1/32, 1/50, 1/64, 1/100, 1/128, 1/200 и 1/256 (уф, это было утомительно).В нем даже есть схема защиты от перегрева, перенапряжение и ток. есть DIP-переключатели для легкого переключения тока и этот драйвер может работать с 4-, 6- или 8-выводными двигателями. Ах да, самое главное, У щенков этой породы есть снижение холостого тока.
Шаговые двигатели: Обеспечивают поступательное движение. Когда водитель отправляет комбинация тока на катушки моторов, он повернется на 1.8 градусов, или жестче в зависимости от настройки микрошага на драйверах. То есть, если у вас есть полшага, тогда вал будет поворачиваться на 0,9 градуса за шаг, четверть шага на 0,45 градуса на шаг, и так далее и так далее … Это двигатели NEMA 24 (стандартная терминология что относится только к характеристикам и размерам лицевой панели), но не позволяйте размера, который вас обманывает, эти двигатели могут выдерживать крутящий момент 382 или 425 унций (в зависимости от по наличию).Текущий рейтинг составляет 2,8 А и 4,17 В, поэтому вам понадобится блок питания, который может потреблять 8,4 ампер, что является хорошим шагом к власти поставлять.
Размеры вала для NEMA 24 обычно составляют 1/4 дюйма, а NEMA 34 — 1/2 дюйма.
Схема подключения: Схема подключения для 3-осевой с использованием стандартной коммутационной платы
Советы по устранению неполадок:
Если моторы не крутятся, а вам интересно, почему? Ниже приведены несколько простых шаги, которые вы можете предпринять, чтобы локализовать проблему.Эти шаги предполагают, что у вас есть Mach4 или другое установленное управляющее программное обеспечение, а для интерфейса требуется параллельный кабель.
1. Чтобы определить, идет ли сигнал с вашего компьютера, вам понадобится для проверки порта на задней панели компьютера и бега трусцой, чтобы проверить, не меняется ли напряжение. Вам понадобится мультиметр. Проверьте каждый вывод, который вы установили как выход. Если нет сигнала, это проблема программного обеспечения или компьютера.
2. Если в порту есть сигнал, подключите параллельный кабель и проверьте другой конец, чтобы увидеть, показывает ли кабель вывод. в противном случае кабель плохой.
3. Если есть сигнал от параллельного порта, проверьте соответствующие контакты на коммутационная плата, если нет, то коммутационная плата может быть неправильно настроена (перемычки).
4.Если есть сигнал, вы на полпути. Тогда нам нужно будет проверить драйверы.
Вот отличное руководство, которое разработал один из моих клиентов, Дэвид В., когда он устранял неполадки в собственной электронике:
Устранение неисправностей — Постройте свой ЧПУ — Диагностика — двигатели не работают / не работают
Это одно из руководств по устранению неполадок со столом Blacktoe CNC, основанное на моем опыте.Он начинается с того момента, когда вы следуете всем инструкциям. для сборки стола установил Mach4 на настольный ПК, настроил моторы, подключил в параллельном кабеле попытался перевернуть одну из осей … и ничего не получил. Это Также предполагается, что у вас есть мультиметр и основные инструменты. Вот еще несколько ресурсы, которые вы, вероятно, захотите прочитать перед тем, как начать:
Документация по Mach 3: http: // www.machsupport.com/documentation.php
Вот так:
1. Прежде чем мы начнем должным образом, отключите передачи, если вы еще этого не сделали. сняв цепи со звездочек, чтобы избежать непредвиденного движения, которое может повредить вас или вашу машину. Кроме того, убедитесь, что вы не ударили себя электрическим током. — отключайте логическую систему, когда работаете с проводкой (и будьте осторожны, когда вы тестируете).Отсоедините параллельный кабель на данный момент (пока вы находитесь на убедитесь, что у вас правильный кабель — вам нужен Straight Thru Serial DB25M / DB25M как этот [http://www.amazon.com/Belkin-25ft-Straight-Serial-DB25M/dp/B00004Z5W7 ]). Кроме того, перезагрузите компьютер, чтобы убедиться, что вы начинаете все заново.
2. Загрузите, установите и запустите монитор параллельного порта:
http: // www.geekhideout.com/parmon.shtml
Это даст вам немедленную обратную связь о том, какие пины проводят на hi и lo. напряжения. Помните: «В цепях TTL любое напряжение от 0 до 0,8 вольт называется «lo» и любое напряжение от 2,4 до 5 вольт называется «hi».
3. Еще раз проверьте конфигурацию «Порты и контакты».
В Config / Ports and Pins / Motor Output вам нужны следующие значения:
X, Y и Z установлены на Включено
X, Y и Z установлены на Step Low Active
Ось X: Шаг Pin #: 2
Ось X: Dir Pin #: 3
Ось Y: Шаг Pin #: 4
Ось Y: Dir Pin #: 5
Ось Z: Шаг Pin #: 6
Ось Z: Dir Pin #: 7
4.Зайдите в Config / Ports and Pins / Input Signals / EStop и нажмите «Active Low». Mach 3 не может отключить EStop, поэтому это «обратит» аварийную остановку в неактивное состояние. при сигнале lo (например, при отключении вилки). Вы нажмете эту настройку включаться и выключаться несколько раз во время поиска неисправностей при подключении и отключении кабель порта, так что узнайте его:
Активный Lo, когда кабель отключен
Активный Hi, когда подключен кабель
5.На экране выполнения программы несколько раз подвигайте ось X вперед и назад, глядя на на параллельном мониторе. Вы должны иметь возможность перемещаться по осям X и Y, нажимая кнопку клавиши со стрелками на клавиатуре, но если вы нажмете кнопку Tab, вы можете начать бег трусцой дополнительный экран, который позволит вам бегать по нему с помощью мыши. Обратите внимание на расположение и цвета контактов в правом верхнем углу массива (контакты с 1 по 7) и как они изменить, когда вы меняете направление.Обратите внимание, что контакты 3, 5 и 7 поменяются с Lo. Привет, когда вы меняете направления.
Красный = высокий сигнал (2,4 — 5,0 В)
Зеленый = низкий сигнал (0,0 — 0,8 В)
6. Подтвердите эти значения, протестировав подключение к параллельному порту на задней панели вашего ПК. Вам нужно будет внимательно присмотреться, чтобы найти номера контактов на вашем порту, потому что они печатаются очень маленького размера, но они должны быть там.Вставьте черный зонд в контакт №1 (должен быть Lo) и исследовать каждый последующий контакт (2-7) красным датчиком. Соответствуют ли напряжения значениям, сообщаемым монитором параллельного порта? В моем случае сигнал Lo составлял 0,0 — 0,1 В, а сигнал Hi составлял 3,3 В. Изменять направления несколько раз для подтверждения. В противном случае ваша проблема заключается в параллельном порт вывода с вашего ПК.
7.Теперь подключите кабель параллельного порта к задней панели вашего ПК *, но не к коммутационному разъему. доска еще *. Повторно проверьте напряжение на конце кабеля так же, как вы проверяли. их в задней части ПК. На этот раз будет немного сложнее, потому что вам придется контактируйте со штифтами вместо того, чтобы держать зонд в отверстиях, но это управляемо. Вы получаете соответствующие показания напряжения? В противном случае у вас может быть плохой / неправильный кабель.
8.Теперь вы можете снова подключить параллельный кабель к коммутационной плате и подключить коммутационная плата и блоки питания драйвера — должны гореть светодиоды на каждом компоненте. Вы заметите, что Mach 3 перейдет в режим EStop, потому что Теперь у вас есть приветственный сигнал, идущий на ПК, поэтому вернитесь в Config / Ports and Pins / Input Сигналы / EStop и отключите «Активный низкий». Нажмите кнопку сброса и попробуйте бегать трусцой ось X несколько раз. Если ничего не происходит, переходите к следующему шагу.
9. Проверьте проводку источника питания к коммутационной плате. Свет горит? Если не у вас может быть обратная схема. Есть ли петля от питания 5В? питание на пин «EN» на плате? Если нет, то ваша доска не задействована. Проверить это поместите красный щуп на вывод 5V и черный щуп на выходные выводы # 2-7. Если ваша плата вставлена правильно, выходной сигнал Hi должен быть около 5,5 вольт (обратите внимание повышение напряжения).Если он не задействован, он будет работать около 1,5 вольт. на каждой булавке.
Хотя это ни в коем случае не исчерпывающее руководство по устранению неполадок, оно должно помочь вы изолируете любые проблемы, которые могут возникнуть в вашей системе, и, надеюсь, вы их началось немного раньше.
Удачи!
Как настроить GRBL и управлять станком с ЧПУ с Arduino
Если вы думаете или в процессе создания собственного станка с ЧПУ, то, скорее всего, вы встретите термин GRBL.Итак, в этом руководстве мы узнаем, что такое GRBL, как установить и как использовать его для управления вашим станком с ЧПУ на базе Arduino.
Кроме того, мы узнаем, как использовать Universal G-code Sender, популярное программное обеспечение контроллера GRBL с открытым исходным кодом.
Что такое GRBL?
GRBL — это программное обеспечение или прошивка с открытым исходным кодом, позволяющая управлять движением для станков с ЧПУ. Мы можем легко установить прошивку GRBL на Arduino и сразу же получить недорогой высокопроизводительный контроллер ЧПУ.GRBL использует G-код в качестве ввода и выводит управление движением через Arduino.
Для лучшего понимания мы можем взглянуть на следующую диаграмму:
Из диаграммы мы можем видеть место GRBL в «большой картине» принципа работы станка с ЧПУ. Это прошивка, которую нам нужно установить или загрузить в Arduino, чтобы она могла управлять шаговыми двигателями станка с ЧПУ. Другими словами, функция прошивки GRBL заключается в переводе G-кода в движение двигателя.
Необходимое оборудование
- Arduino — Как мы уже говорили, нам понадобится Arduino для установки GRBL. В частности, нам нужна плата Arduino на базе Atmega 328, а это означает, что мы можем использовать либо Arduino UNO, либо Nano.
- Шаговые двигатели — Очевидно, что шаговые двигатели обеспечивают движение машины.
- Драйверы — Для управления шаговыми двигателями нам нужны драйверы, и распространенный выбор, когда дело доходит до небольших станков с ЧПУ DIY (использующих шаговые двигатели NEMA 14 или 17), — это драйверы A4988 или DRV8825.
- Arduino CNC Shield — для подключения шаговых драйверов к Arduino самый простой способ — использовать Arduino CNC Shield. Он использует все контакты Arduino и обеспечивает простой способ подключения всего: шаговых двигателей, шпинделя / лазера, концевых выключателей, охлаждающего вентилятора и т. Д.
Обратите внимание, что это только основные электронные компоненты, которые нам нужны, чтобы понять, как работает станок с ЧПУ.
На самом деле, в качестве примера того, как все должно быть соединено, мы можем взглянуть на мою машину для резки пенопласта с ЧПУ своими руками.
Вы можете проверить и получить основные электронные компоненты, необходимые для сборки этого станка с ЧПУ, здесь:
Раскрытие информации: это партнерские ссылки. Как партнер Amazon я зарабатываю на соответствующих покупках.
Главный инструмент этого станка с ЧПУ — это горячая проволока, которая может легко расплавить или прорезать пенополистирол и придать любую форму, которую мы хотим. Для получения более подробной информации о том, как я сделал машину и как все работает, вы можете ознакомиться с конкретным руководством.
Тем не менее, мы будем использовать этот станок в качестве примера в этой статье, потому что тот же принцип работы применим и к любому другому станку с ЧПУ, будь то фрезерный или лазерный.
Как установить GRBL
Во-первых, для того, чтобы иметь возможность установить или загрузить GRBL в Arduino, нам понадобится Arduino IDE.
Затем мы можем скачать прошивку GRBL с github.com.
Загрузите его как файл .ZIP и выполните следующие действия:
- Откройте файл grbl-master.zip и извлеките файлы
- Откройте IDE Arduino, перейдите в Sketch> Include Library> Add .ZIP Library…
- Перейдите в извлеченную папку «grbl-master», в ней выберите папку «grbl» и щелкните открытый файл.Теперь нам нужно использовать GRBL как библиотеку Arduino.
- Затем перейдите в Файл> Примеры> grbl> grblUpload. Откроется новый скетч, и нам нужно загрузить его на плату Arduino. Код может выглядеть странно, потому что это всего лишь одна строка, но не беспокойтесь, все происходит в фоновом режиме в библиотеке. Итак, нам просто нужно выбрать плату Arduino, COM-порт и нажать кнопку загрузки, и все готово.
Конфигурация GRBL
На этом этапе мы должны настроить или настроить GRBL для нашей машины.Мы можем сделать это через Serial Monitor IDE Arduino. Как только мы откроем Serial Monitor, мы получим сообщение типа «Grbl 1.1h [‘ $ ’for help]». Если вы не видите это сообщение, убедитесь, что вы изменили скорость передачи данных на 115200.
Если мы введем «$$», мы получим список команд или текущих настроек, и они будут выглядеть примерно так:
100 долларов = 250 000 (x, шаг / мм)
101 доллар = 250 000 (y, шаг / мм)
102 доллара = 3200 000 (z, шаг / мм)
110 долларов = 500 000 (x максимальная скорость, мм / мин)
111 долларов = 500 .2)
Все эти команды могут или должны быть настроены в соответствии с нашим станком с ЧПУ. Например, с первой командой, $ 100 = 250,000 (x, шаг / мм), мы можем настроить шаги на мм машины, или мы можем указать, сколько шагов должен сделать двигатель, чтобы наша ось X сместилась на 1 мм.
Однако я бы предложил оставить эти настройки как есть. Есть более простой способ настроить их в соответствии с нашей машиной с помощью программного обеспечения контроллера, который мы объясним в следующем разделе.
Контроллер GRBL
Итак, как только мы установили прошивку GRBL, теперь наша Arduino знает, как читать G-код и как управлять станком с ЧПУ в соответствии с ним. Однако, чтобы отправить G-код на Arduino, нам нужен какой-то интерфейс или программное обеспечение контроллера, которое сообщит Arduino, что делать. На самом деле для этого существует множество программ как с открытым кодом, так и коммерческих. Конечно, мы будем придерживаться открытого исходного кода, поэтому в качестве примера мы будем использовать Univarsal G-code Sender.
Как использовать универсальный отправитель G-кода
В этом примере я буду использовать версию платформы 2.0. После загрузки нам нужно извлечь zip-файл, перейти в папку «bin» и открыть любой из исполняемых файлов «ugsplatfrom». На самом деле это программа JAVA, поэтому для запуска этой программы сначала необходимо установить среду выполнения JAVA.
Как только мы откроем универсальный отправитель G-кода, сначала нам нужно настроить машину или настроить параметры GRBL, показанные ранее.Для этой цели мы воспользуемся мастером настройки UGS, который намного удобнее, чем вводить команды вручную через Serial Monitor IDE Arduino.
Первый шаг здесь — выбрать скорость передачи, которая должна быть 115200, и порт, к которому подключен наш Arduino. Как только мы подключим универсальный отправитель G-кода к Arduino, на следующем шаге мы сможем проверить направление движения двигателей.
При необходимости мы можем изменить направление с помощью мастера или вручную переключить соединение двигателя на Arduino CNC Shield.
На следующем шаге мы можем настроить параметр шагов / мм, о котором мы упоминали ранее. Здесь гораздо проще понять, как его настроить, потому что мастер настройки вычислит и сообщит нам, до какого значения мы должны обновить параметр.
Значение по умолчанию — 250 шагов / мм. Это означает, что если мы нажмем кнопку перемещения «x +», двигатель сделает 250 шагов. Теперь, в зависимости от количества физических шагов двигателя, выбранного шагового разрешения и типа передачи, машина будет перемещаться на некоторое расстояние.Используя линейку, мы можем измерить фактическое перемещение машины и ввести это значение в поле «Фактическое перемещение». На основании этого мастер рассчитает и сообщит нам, на какое значение следует изменить параметр шаги / мм.
В моем случае для DIY-станка с ЧПУ, который я сделал, станок сдвинулся на 3 мм. В соответствии с этим мастер предложил обновить параметр шаги / мм до значения 83.
После обновления этого значения станок теперь движется правильно, 1 мм в программном обеспечении означает 1 мм для станка с ЧПУ.
В консоли UGS, когда мы выполняем каждое действие, мы можем видеть выполняемые команды. Мы можем заметить, что, обновив параметр steps / mm, программа UGS фактически отправила в Arduino или прошивку GRBL команду, о которой мы упоминали ранее. Это было значение по умолчанию: 100 долларов США = 250 000 (x, шаг / мм), а теперь мы обновили значение до 83 шагов на мм: 100 долларов = 83.
На следующем этапе мы можем включить концевые выключатели и проверить, правильно ли они работают.
В зависимости от того, являются ли они нормально разомкнутыми или нормально замкнутыми соединениями, мы также можем инвертировать их здесь.
Здесь стоит отметить, что иногда нам нужно отключить концевой выключатель оси Z. Так было с моим DIY-автоматом для резки пенопласта с ЧПУ, где мне не понадобился концевой выключатель оси Z, и мне пришлось отключить его, чтобы иметь возможность правильно разместить станок. Итак, для этого нам нужно отредактировать файл config.h, который находится в папке библиотеки Arduino (или Documents \ Arduino \ libraries).
Здесь нам нужно найти линии цикла наведения и прокомментировать установку по умолчанию для 3-х осевого станка с ЧПУ и раскомментировать настройку для 2-х осевых станков.Чтобы изменения вступили в силу, нам нужно сохранить файл и повторно загрузить эскиз grblUpload на нашу плату Arduino.
Тем не менее, на следующем шаге мы можем либо включить, либо отключить возвращение в исходное положение фрезерной обработки с ЧПУ.
Используя кнопку «Попробовать возврат в исходное положение», машина начнет движение к концевым выключателям. Если все пойдет наоборот, мы можем легко изменить направление.
Наконец, на последнем шаге мастера настройки мы можем включить мягкие ограничения для нашего станка с ЧПУ.
Мягкие ограничения не позволяют машине выходить за пределы установленной рабочей зоны.
Заключение
Итак, благодаря прошивке GRBL и Arduino, мы можем легко настроить и запустить наш DIY-станок с ЧПУ. Конечно, в этом руководстве мы рассмотрели только основы, но я думаю, что этого было достаточно, чтобы понять, как все работает и как запустить и запустить наш первый станок с ЧПУ.
Конечно, доступно множество других настроек и функций, так как GRBL действительно совместим с микропрограммным обеспечением контроллера ЧПУ.Документация GRBL подробно объясняет все это, поэтому вы всегда можете проверить их на их вики-странице на github.
