Как устроен лидар и на каком принципе он работает. Какие компоненты нужны для создания самодельного лидара на Arduino. Как собрать и запрограммировать простой лидар своими руками. На что способен самодельный лидар и где его можно применить.
Что такое лидар и как он работает
Лидар (LIDAR — Light Identification Detection and Ranging) — это технология получения и обработки информации об удаленных объектах с помощью активных оптических систем. Принцип работы лидара схож с радаром, но вместо радиоволн используется лазерное излучение.
Основные компоненты лидара:
- Источник лазерного излучения (чаще всего инфракрасный лазер)
- Оптическая система для фокусировки лазерного луча
- Приемник отраженного сигнала
- Система сканирования для охвата нужной области
- Вычислительный блок для обработки данных
Принцип работы лидара основан на измерении времени прохождения лазерного импульса до объекта и обратно. Зная скорость света, можно вычислить расстояние до объекта. При сканировании пространства формируется облако точек, описывающее форму окружающих предметов.
Компоненты для создания самодельного лидара
Для сборки простого лидара на Arduino нам потребуются следующие компоненты:
- Arduino Nano или другая совместимая плата
- Инфракрасный датчик расстояния (например, VL53L0X)
- Шаговый двигатель для вращения датчика
- Драйвер шагового двигателя
- Подшипник для плавного вращения
- Контактное кольцо для передачи сигналов на вращающуюся часть
- Корпус, напечатанный на 3D-принтере
- Провода, винты, гайки
Общая стоимость компонентов составит около 100 долларов, что значительно дешевле готовых коммерческих решений.
Сборка корпуса и механической части
Корпус лидара можно спроектировать в любой CAD-системе и напечатать на 3D-принтере. Основные элементы корпуса:
- Основание для крепления двигателя и электроники
- Вращающаяся платформа для датчика расстояния
- Крышка для защиты от пыли
Шаги по сборке механической части:
- Установить подшипник в основание корпуса
- Закрепить шаговый двигатель
- Установить контактное кольцо
- Собрать вращающуюся платформу с датчиком
- Соединить платформу с валом двигателя
Важно обеспечить плавное вращение платформы с минимальным люфтом для точных измерений.
Электрическая схема и подключение компонентов
Схема подключения основных компонентов:
- Arduino Nano подключается к компьютеру через USB
- Выводы SDA и SCL Arduino соединяются с датчиком VL53L0X через контактное кольцо
- Драйвер шагового двигателя подключается к Arduino и двигателю
- Питание 5В подается на Arduino и датчик расстояния
Для повышения напряжения с 5В до 12В можно использовать повышающий преобразователь. Все соединения лучше выполнить на макетной плате или изготовить печатную плату.
Программирование Arduino для управления лидаром
Основные задачи программы для Arduino:
- Инициализация и настройка датчика VL53L0X
- Управление вращением двигателя
- Считывание данных с датчика расстояния
- Определение текущего угла поворота
- Отправка данных на компьютер
Алгоритм работы программы:
- Инициализация компонентов
- Запуск вращения платформы
- Цикл измерений:
- Получение расстояния с датчика
- Определение текущего угла
- Отправка пары «угол-расстояние»
Для работы с датчиком VL53L0X можно использовать готовые библиотеки. Данные удобно передавать в формате CSV для дальнейшей обработки.

Калибровка и настройка самодельного лидара
Для повышения точности измерений необходимо выполнить калибровку лидара:
- Выставить нулевое положение датчика
- Откалибровать углы поворота
- Провести серию тестовых измерений
- Построить калибровочную кривую
Основные параметры для настройки:
- Скорость вращения платформы
- Частота измерений датчика
- Фильтрация выбросов в данных
- Параметры передачи данных
Оптимальные настройки подбираются экспериментально в зависимости от условий использования лидара.
Обработка и визуализация данных с лидара
Для работы с данными лидара можно использовать различные средства:
- Построение 2D-карты в полярных координатах
- 3D-визуализация облака точек
- Детектирование объектов и препятствий
- Построение карты помещения
Популярные инструменты для обработки данных лидара:
- Математические пакеты (MATLAB, Octave)
- Библиотеки компьютерного зрения (OpenCV)
- Фреймворки для роботов (ROS)
- Языки программирования (Python, C++)
Визуализация позволяет наглядно оценить работу самодельного лидара и выявить возможные проблемы.
Применение самодельного лидара в робототехнике
Области применения простого лидара в любительской робототехнике:
- Построение карты помещения
- Навигация мобильного робота
- Обнаружение препятствий
- 3D-сканирование объектов
- Измерение габаритов предметов
Самодельный лидар можно установить на робота-пылесоса, дрона или любую подвижную платформу. Это позволит роботу ориентироваться в пространстве и взаимодействовать с окружающими объектами.
Ограничения и перспективы развития
Основные ограничения самодельного лидара:
- Невысокая точность измерений
- Ограниченная дальность действия
- Низкая скорость сканирования
- Чувствительность к освещению
Направления для улучшения конструкции:
- Использование более точных датчиков
- Применение многолучевых лидаров
- Комбинирование с другими сенсорами
- Оптимизация алгоритмов обработки данных
Несмотря на ограничения, самодельный лидар — отличный инструмент для изучения принципов работы подобных устройств и экспериментов в области робототехники и компьютерного зрения.
Конструирование LIDAR своими руками. Часть1 / Хабр
Данная статья посвящена изучению принципов и практической реализации технологии обнаружения и определения дальности с помощью активных оптических систем (LIDAR)
LIDAR – Light Detection and Ranging – технология получения и обработки информации об удалённых объектах с помощью активных оптических систем, применяющих явления поглощения и рассеяния света в оптически прозрачных средах.
На сегодняшний день оптические локационные системы являются наиболее распространёнными системами, привлекающих к себе внимание учёных и практиков как инструменты, обеспечивающие максимальную информативность и точность при наблюдениях и дистанционных измерениях.
Оптическая локация, представляет собой совокупность методов обнаружения, измерения координат, а также распознавания формы удалённых объектов с помощью электромагнитных волн оптического диапазона. Одной из известных оптических локационных систем является технология LIDAR.
Целью статьи является, исследование различных областей применения оптических локационных систем, более глубокое познание в их использовании, огромнейшая ценность этих систем в наше время, их дальнейшие тенденции и возможности развития. А также статья направлена на выявление современной и актуальной технологии, работающей на основе оптических локационных систем.
Технология LIDAR
Лидары – лазерные локационные оптико-электронные системы (ОЭС) активного типа, предназначенные для активного дистанционного зондирования окружающей среды с целью получения информации для решения научных, производственных, экологических и метрологических задач.
Исторически, название «лидар» соответствует латинской аббревиатуре «LIDAR» английского выражения «light identification, detection and ranging», то есть оптическое распознавание, обнаружение и локация (определение местоположения).
Лидар работает, подсвечивая цель светом и может использовать свет видимого, ультрафиолетового или ближнего инфракрасного диапазонов.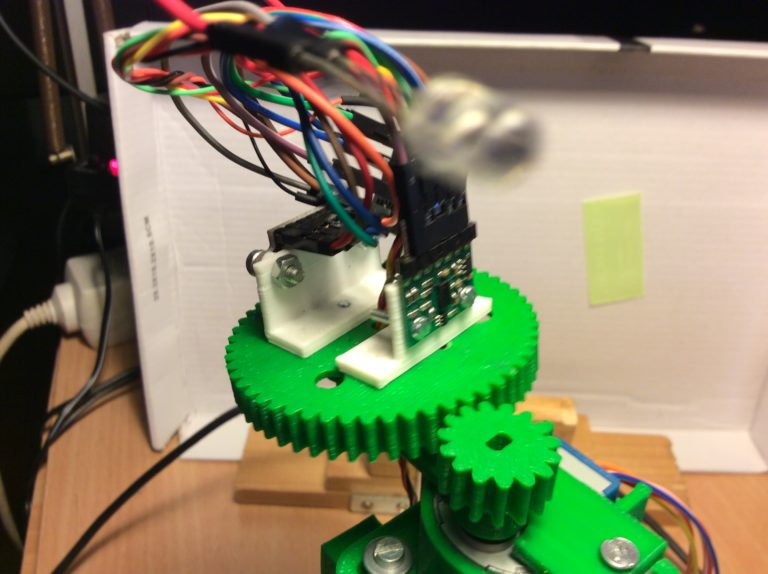 Принцип действия технологии прост. Объект (поверхность) освещается коротким световым импульсом, измеряется время, через которое сигнал вернется к источнику. Лидар запускает быстрые короткие импульсы лазерного излучения на объект (поверхность) с частотой до 150000 импульсов в секунду. Датчик на приборе измеряет промежуток времени между передачей светового импульса и его отражением, исходя из постоянной скорости света равной 299792 км/с. Измеряя этот промежуток времени можно вычислить дистанцию между лидаром и отдельной частью объекта и, следовательно, построить изображение объекта на основе его положения относительно лидара.
Принцип действия технологии прост. Объект (поверхность) освещается коротким световым импульсом, измеряется время, через которое сигнал вернется к источнику. Лидар запускает быстрые короткие импульсы лазерного излучения на объект (поверхность) с частотой до 150000 импульсов в секунду. Датчик на приборе измеряет промежуток времени между передачей светового импульса и его отражением, исходя из постоянной скорости света равной 299792 км/с. Измеряя этот промежуток времени можно вычислить дистанцию между лидаром и отдельной частью объекта и, следовательно, построить изображение объекта на основе его положения относительно лидара.
Технология существует с 1960-х годов, когда лазерные сканеры были установлены на самолетах. Лишь в конце 1980-х годов, с появлением коммерчески жизнеспособных систем GPS, данные с лидаров стали полезным инструментом для обеспечения точных геопространственных измерений.
Практическое применение
Система чаще всего используется для геодезических задач. Геодезия является одной из самых известных областей применения технологии. Съемка используется в областях строительства, городского планирования и изучения топографии региона. При съемке материалы собираются очень быстро, превосходя обычные методы. Пространственные модели, созданные с использованием LIDAR, имеют незначительную погрешность, экономят деньги и позволяют принимать решения быстрее. При съемке точки преобразуются в цифровую модель рельефа. Цифровая модель рельефа может иметь любую текстуру в зависимости от области применения и плотности.
Геодезия является одной из самых известных областей применения технологии. Съемка используется в областях строительства, городского планирования и изучения топографии региона. При съемке материалы собираются очень быстро, превосходя обычные методы. Пространственные модели, созданные с использованием LIDAR, имеют незначительную погрешность, экономят деньги и позволяют принимать решения быстрее. При съемке точки преобразуются в цифровую модель рельефа. Цифровая модель рельефа может иметь любую текстуру в зависимости от области применения и плотности.
Лазерное сканирование является популярным методом обнаружения риска наводнений, накопления углерода в лесном хозяйстве и мониторинга береговой эрозии.
На сегодняшний день наиболее распространёнными сферами использования системы лидар являются приложения для географического и атмосферного картографирования. Такие организации, как USGS (Геологическая служба США), NOAA (Национальное управление океанографии и атмосферы) и NASA, десятилетиями использовали лидар для создания карт Земли и космоса.
NASA разработало для международной космической станции инструмент под названием GEDI (исследование динамики глобальной экосистемы), который обеспечивает уникальное трехмерное изображение лесов Земли и помогает предоставить информацию об углеродном цикле, который ранее не был доступен. GEDI предоставляет жизненно важную информацию о влиянии деревьев на количество углерода в атмосфере. Используя эту информацию, ученые теперь могут определить точный уровень углерода, который хранится в лесах, и количество деревьев, которые необходимо посадить, чтобы компенсировать влияние выбросов парниковых газов.
Климатологи используют лидар, чтобы исследовать состав атмосферы и изучать облака, испарения и глобальное потепление.
Ботаники применяют эту технологию, чтобы измерить постоянно меняющиеся структуры лесов Земли.
Одним из наиболее распространённых применений является полицейское оборудование для измерения скорости автомобилей.
Портативные приборы гораздо чаще используют лазеры с длиной волны 905 нм, которые недорогие, безопасные и очень эффективные.
Лидар следует называть глазами автономного транспортного средства, поскольку он смотрит на окружение, вычисляет расстояние, определяет препятствия впереди, освещает объекты лазером, а затем создают цифровое изображение высокого разрешения. Он также используется для предотвращения столкновений, путем измерения расстояния между автомобилем и любым другим препятствием перед ним. Это делается путем установки модуля на бампер или крышу. Адаптивная система круиз-контроля в автономном автомобиле получает информацию от датчиков, с помощью которых она решает, когда включать тормоза, замедляться либо ускоряться.
Для исследования старых археологических раскопок, здесь лидар полезен из-за исключительной детализации, которую он может сделать. При этом экономится время, а также усилия археологов, позволяя им «воскрешать» объекты, которые раньше было практически невозможно создать. Потрясающие трехмерные изображения древнего города майя, были созданы двумя археологами с помощью лидара. Эта модель позволила совершенно по-другому взглянуть на структуру города и назначение отдельных зданий.
Проектирование прибора LIDAR
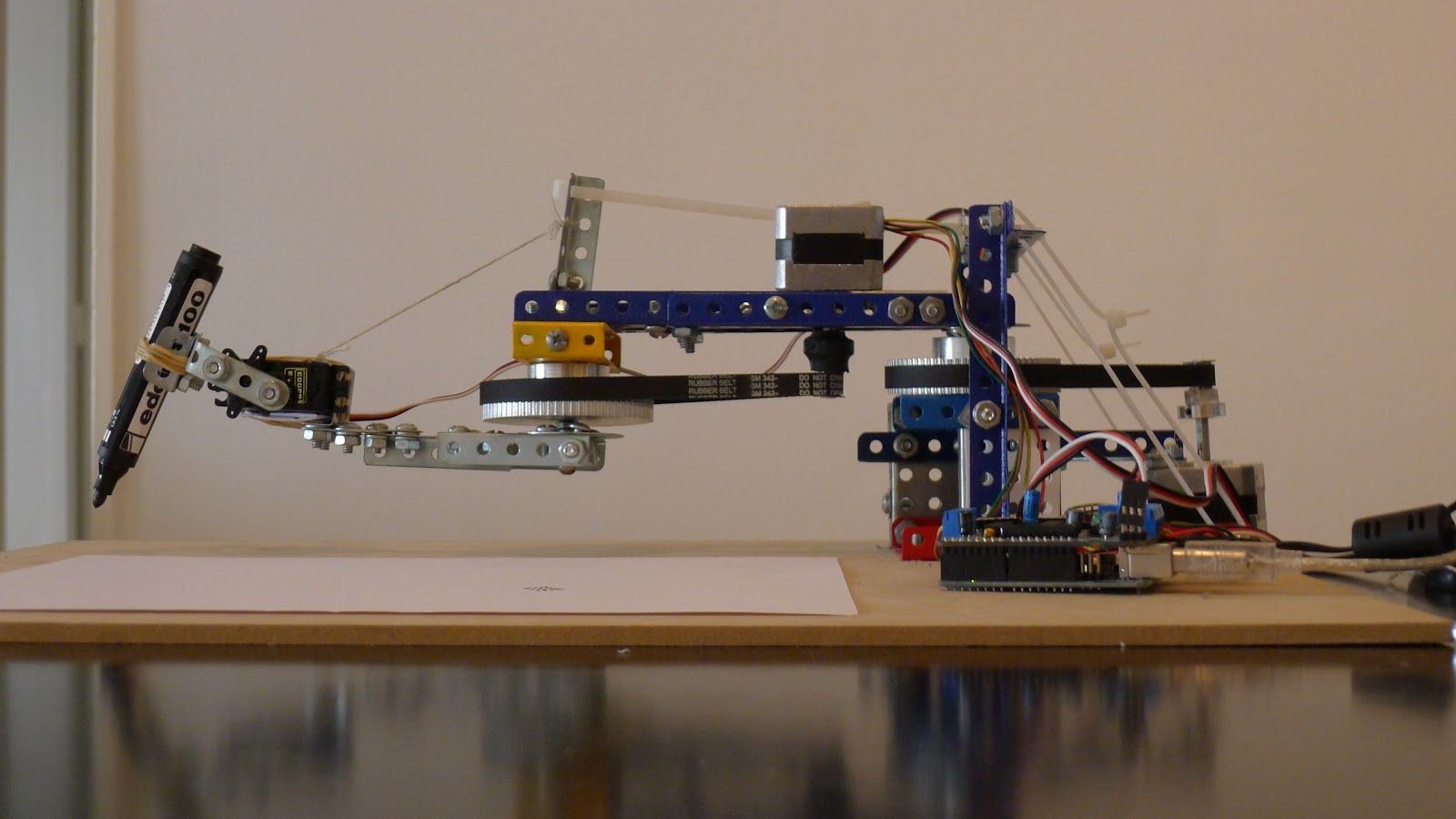
В этой статье будет пошагово описан процесс создания лидара своими руками. По характеристикам он несравним с коммерческими лидарами, но вполне подойдёт для небольшого простого робота, чтобы он мог обнаруживать и избегать препятствия на своём пути или более-менее точно строить карту помещения.
Схема практической реализации представлена на рисунках ниже.
Эскиз корпусаПодробный эскиз корпусаКорпус лидара можно сделать по-разному, но для проекта был разработан и выбран один из самых простых и удобных вариантов его изготовления. В нашем случает для его изготовления применялся 3D принтер. Корпус сделан так, что верхней части установлена подставка для электромотора, а также закреплены датчик Холла, магнит и зеркало (смотрите рисунки ниже).
Основной корпусОсновной корпусДатчики Холла представляют из себя твердотельные радиоэлементы, которые становятся все более популярными среди радиолюбителей и разработчиков радиоэлектронных устройств. Такие датчики являются абсолютно герметичными и представляют из себя простой радиоэлемент, они не боятся вибрации, пыли и влаги. Датчик Холла простыми словами – это радиоэлемент, который реагирует на внешнее магнитное поле.
Такие датчики являются абсолютно герметичными и представляют из себя простой радиоэлемент, они не боятся вибрации, пыли и влаги. Датчик Холла простыми словами – это радиоэлемент, который реагирует на внешнее магнитное поле.
Для вращения зеркала на 360° был использован электродвигатель, который может работать при питании от сети как постоянного, так и однофазного переменного тока.
Рисунок 6 — Вращение электродвигателяМагнит необходим для того, чтобы на него срабатывал датчик Холла и в этот момент в коде происходит установка переменной «угол» в некоторое значение. Если магнит по размерам позволяет наклеить его по центру под датчиком, это будет самый лучший вариант, т.к. при срабатывании переменной «угол» нужно будет присвоить значение 0. Если нет, магнит можно наклеить возле датчика. Тогда переменной «угол» нужно будет присвоить не 0, а соответствующее значение (на какой угол относительно магнита повёрнут датчик). Если магнит находится с противоположной стороны, нужно присвоить 180 ( в данном случае присваивается 180).
В нижней части корпуса располагаются такие компоненты, как:
Arduino NANO,
Модуль с датчиком VL53L0X,
Потенциометр на 10 кОМ,
Резистор на 10 кОМ.
Arduino — это компактная электронная плата, способная управлять различными датчиками, электродвигателями, индикацией, освещением, передавать и принимать данные.
VL53L0X использует технологию STS FlightSense для точного измерения времени, которое потребуется для испускаемых импульсов инфракрасного лазерного излучения, чтобы достичь ближайшего объекта и отразиться обратно на детектор.
Потенциометры — это регулируемые делители напряжения, которые предназначены для регулирования напряжения при неизменной величине тока, и выполненные по типу переменного резистора.
Заключение
В статье был описан процесс создания лидара своими руками.
На этом этапе мы заканчиваем конструирование лидара, во второй части статьи будет произведено программирование и создание 3D карты помещения.
не путать с радаром! / Амперка
Сканирование местности — одна из главных задач для беспилотных роботов, которые самостоятельно прокладывают путь из точки А в Б. Решать её можно по-разному: всё зависит от бюджета и поставленных целей, но общая суть инженерного подхода остаётся похожей. Лидарные системы стали стандартом де-факто для беспилотных автомобилей и роботов. А ещё лидар можно приладить к своему проекту на Arduino!
Как это работает
Название LiDAR расшифровывается как «Light Identification Detection and Ranging» — дословно, система световой идентификации, обнаружения и определения дальности. Из названия понятно, что лидар имеет что-то общее с радаром. Вся разница в том, что вместо СВЧ-радиоволн здесь используются волны оптического диапазона.
Давайте вспомним общий принцип работы подобных систем: у нас есть устройство, которое посылает наружу направленное излучение, затем ловит отражённые волны и строит исходя из этого картину пространства. Именно так и работает лидар: в качестве активного источника используют инфракрасный светодиод или лазер, лучи которого мгновенно распространяются в среде. Рядом с излучателем расположен светочувствительный приёмник — он и улавливает отражения.
Рядом с излучателем расположен светочувствительный приёмник — он и улавливает отражения.
Обозначения: D — измеренное расстояние; c — скорость света в оптической среде; f — частота сканирующих импульсов; Δφ — фазовый сдвиг.
Получив время, за которое вернулась отражённая волна, мы можем определить расстояние до объекта в поле зрения датчика. Подобный принцип определения дистанции называют времяпролётным — от английского Time-of-flight (ToF). А что дальше? У вас появляются разные возможности, как распорядиться этими данными.
Оптический дальномер
Дальномер — это частный случай лидара, у которого сравнительно узкий угол наблюдения. Устройство смотрит вперёд в узком сегменте и не получает посторонних данных, кроме удалённости объектов. Так работает оптический дальномер, основанный на принципе ToF. Рабочая дистанция зависит от используемого источника света: для ИК-светодиодов это десятки метров, а лазерные лидары способны стрелять лучом на километры вперёд. Неудивительно, что эти приборы прижились в беспилотных летающих аппаратах (БПЛА) и метеорологических установках.
Неудивительно, что эти приборы прижились в беспилотных летающих аппаратах (БПЛА) и метеорологических установках.
Однако быстродействующий дальномер может пригодиться и в самодельных роботах на Arduino и Raspberry Pi: лидары не боятся засветки солнцем, а скорость реакции у них выше, чем у ультразвуковых датчиков. Используя лидар в качестве датчика пространства, ваше детище сможет видеть препятствия на увеличенной дистанции. Разные модели отличаются дальностью работы и степенью защиты. Модификации в герметичном корпусе позволят роботу работать на улице.
Лидарная камера
Следующая ступень развития — лидар в роли 3D-камеры. Добавляем к одномерному лучу систему развёртки и получаем прибор, который может построить модель пространства из облака точек в определённой зоне обзора. Для перемещения сканирующего луча чего только не применяют: от поворотных зеркал и призм до микроэлектромеханических систем (МЭМС). Подобные решения используют, например, для быстрого построения 3D-карты местности или оцифровки архитектурных объектов.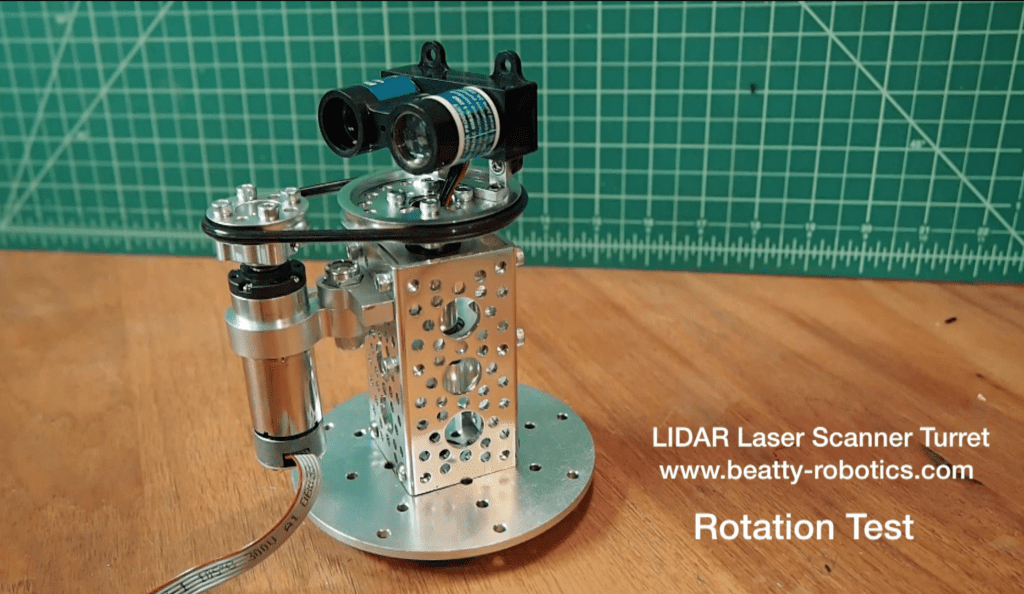
Сканирующий лидар с круговым обзором
Вот и мечта любого автопроизводителя — главный сенсор, который заменяет беспилотной машине почти все глаза. Здесь мы имеем комбинацию излучателей и приёмников, установленных на поворотной платформе, которая вращается со скоростью в сотни оборотов в минуту. Плотность генерируемых точек такова, что лидар строит полноценную картину местности, в которой видно другие машины, пешеходов, столбы и деревья на обочине, и даже изъяны дорожного покрытия или рельефную разметку!
Лидары с круговым обзором 360° — наиболее сложные и дорогие из всех разновидностей, но и самые желанные для разработчиков, поэтому они часто встречаются на прототипах беспилотных автомобилей, где вопрос стоимости не стоит слишком остро.
В заключение
Дожидаться светлого беспилотного будущего совсем необязательно, ведь можно начать собственные эксперименты с инфракрасным лидаром на Arduino или Raspberry Pi уже сейчас. Если вам нужен дальномер с рабочей дистанцией до 40 метров и моментальной реакцией — это подходящий вариант. А если заморочиться и моторизовать лидар, то у вас получится сделать и любительский 3D-сканер на принципе ToF.
А если заморочиться и моторизовать лидар, то у вас получится сделать и любительский 3D-сканер на принципе ToF.
Полезные ссылки
- Каталог датчиков пространства
Lingkang Zhang » Самодельный 3D-лидар
Введение
Несмотря на то, что в наши дни лидары становятся дешевле, 3D-лидар все еще может стоить > 4000 долларов, например, VLP-16. Альтернативный подход заключается в создании 3D-лидара путем вращения 2D-лидара, такого как упомянутый в этой статье, с использованием 2D-лидара Hokuyo, который все еще довольно дорог и стоит несколько тысяч долларов.
В этой статье рассказывается о самодельном 3D-лидаре, изготовленном из очень дешевого 2D-лидара, серводвигателя и нескольких напечатанных на 3D-принтере деталей общей стоимостью около 100 долларов. Производительность проверяется путем выполнения 3D-картирования с использованием программного обеспечения LOAM.
Аппаратное обеспечение
Аппаратное обеспечение в целом довольно простое. Он включает в себя YDlidar X4, сервопривод с последовательной шиной Feetech STS3215, некоторые подшипники и напечатанные на 3D-принтере детали.
Он включает в себя YDlidar X4, сервопривод с последовательной шиной Feetech STS3215, некоторые подшипники и напечатанные на 3D-принтере детали.
Преимущество использования этого сервопривода с последовательной шиной вместо обычного сервопривода с ШИМ для хобби заключается в том, что я могу легко контролировать скорость и получать обратную связь по углу, что упрощает реализацию программного обеспечения.
Я также сделал крепление, чтобы прикрепить его к мобильной платформе с двумя колесами с энкодерами и бортовым компьютером, чтобы я мог тестировать на нем программное обеспечение для 3D-картографии.
Программное обеспечение
Здесь в программном обеспечении используется ROS. Во-первых, мне нужно создать Tf-дерево, которое включает информацию об относительном положении данных лидарного сканирования по отношению к базе. Вот упрощенная древовидная диаграмма Tf системы.
После создания дерева Tf мне просто нужно опубликовать 2D лидарное сканирование в соответствующем кадре. Затем здесь используется пакет laser_geometry для преобразования данных 2D-лидарного сканирования в формат данных облака точек, чтобы данные можно было передавать в популярные программы для 3D-картографирования.
Затем здесь используется пакет laser_geometry для преобразования данных 2D-лидарного сканирования в формат данных облака точек, чтобы данные можно было передавать в популярные программы для 3D-картографирования.
Видео
В этом видео показан рендеринг облака точек в Rviz. Обратите внимание, что на самом деле это не «отображение». Я просто добавил задержки отображения всех данных лидарного сканирования, и они накапливались с течением времени. Одометрия колес также использовалась в демонстрации с мобильной платформой.
В этом видеоролике показано реальное трехмерное картографирование с помощью программного обеспечения LOAM, изначально созданного Ji Zhang et al. еще в 2014 году. Мне нужно было немного адаптировать программное обеспечение, чтобы оно работало должным образом.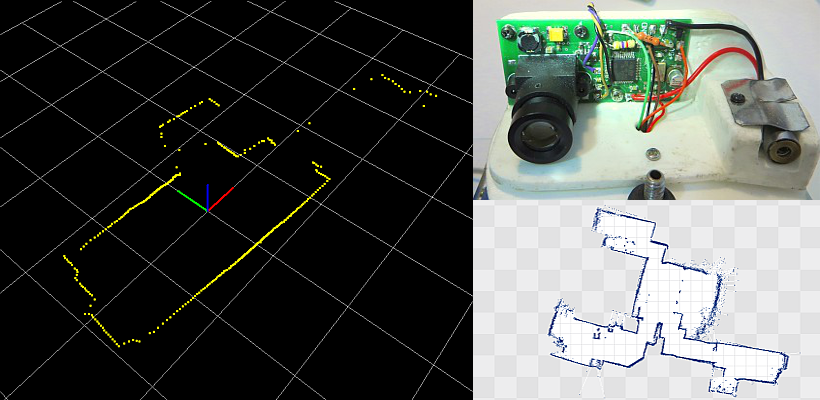 Исходное программное обеспечение использовало некоторые вычисления, чтобы определить, выполняется ли развертка (лидар вращается от одного конца к другому), в то время как мои данные слишком разрежены, чтобы сделать это, поэтому я модифицировал программное обеспечение, чтобы получать пустое сообщение, опубликованное из моей самодельной 3dlidar ROS. узел, чтобы определить, выполняется ли развертка.
Исходное программное обеспечение использовало некоторые вычисления, чтобы определить, выполняется ли развертка (лидар вращается от одного конца к другому), в то время как мои данные слишком разрежены, чтобы сделать это, поэтому я модифицировал программное обеспечение, чтобы получать пустое сообщение, опубликованное из моей самодельной 3dlidar ROS. узел, чтобы определить, выполняется ли развертка.
Заключение
В целом, проект достаточно успешен, и в нем реализовано базовое 3D-картографирование помещений. Система имеет два основных недостатка:
* во-первых, слишком низкая частота сканирования (около 10 Гц для 2D-сканирования), так как используется очень недорогой 2D-лидар
* во-вторых, отсутствует коррекция искажения данных 2D-лидара (в идеале это можно сделать с помощью IMU, установленного на лидаре), что мне нужно было очень медленно перемещать робота, чтобы правильно составить карту
Arduino самодельный лидар, датчик расстояния, ИК и обработка
DIY Arduino LIDARПомогите мне, поделившись этим постом
Поделиться
ПРЕДЫДУЩИЙ РУКОВОДСТВО СЛЕДУЮЩАЯ ЧАСТЬ
В этом уроке мы будем делать самодельный лидар. Не так хорош, как коммерческий датчик лидара, но для небольшого робота этого будет достаточно, чтобы избежать препятствий. Я покажу вам, что такое лидар, как они работают и как я сделал самодельный датчик на основе Arduino и инфракрасного датчика расстояния. Я спроектировал и напечатал на 3D-принтере корпус таким образом, чтобы он мог без остановки вращаться на 360 градусов. Для лучшей поддержки он также имеет большой подшипник внутри. Вращение управляется шаговым двигателем, а лидар имеет базовый выход со значениями угла и расстояния. Мы могли бы использовать эти значения для создания карты препятствий вокруг нашего робота, например. Я также покажу вам, как получить лучшие результаты, если вам нужна более высокая точность.
Не так хорош, как коммерческий датчик лидара, но для небольшого робота этого будет достаточно, чтобы избежать препятствий. Я покажу вам, что такое лидар, как они работают и как я сделал самодельный датчик на основе Arduino и инфракрасного датчика расстояния. Я спроектировал и напечатал на 3D-принтере корпус таким образом, чтобы он мог без остановки вращаться на 360 градусов. Для лучшей поддержки он также имеет большой подшипник внутри. Вращение управляется шаговым двигателем, а лидар имеет базовый выход со значениями угла и расстояния. Мы могли бы использовать эти значения для создания карты препятствий вокруг нашего робота, например. Я также покажу вам, как получить лучшие результаты, если вам нужна более высокая точность.
ЧАСТЬ 1 — Что нам нужно
Это то, что нам нужно для этого проекта. Во-первых, загрузите 3D-файлы снизу и распечатайте их с помощью PLA. Затем идите и купите двигатель, ИК-датчик расстояния и остальные мелкие детали, такие как драйверы, Arduino и так далее. Также вам понадобится эластичная резинка, припой и паяльник.
Во-первых, загрузите 3D-файлы снизу и распечатайте их с помощью PLA. Затем идите и купите двигатель, ИК-датчик расстояния и остальные мелкие детали, такие как драйверы, Arduino и так далее. Также вам понадобится эластичная резинка, припой и паяльник.
Нам нужно:
-
1 футляр для 3D-файлов: 3D-файлы STL
-
1 х Arduino NANO: ССЫЛКА eBay
-
1 датчик VL53L0X: LINK eBay
-
.
.
-
См. полный список деталей…
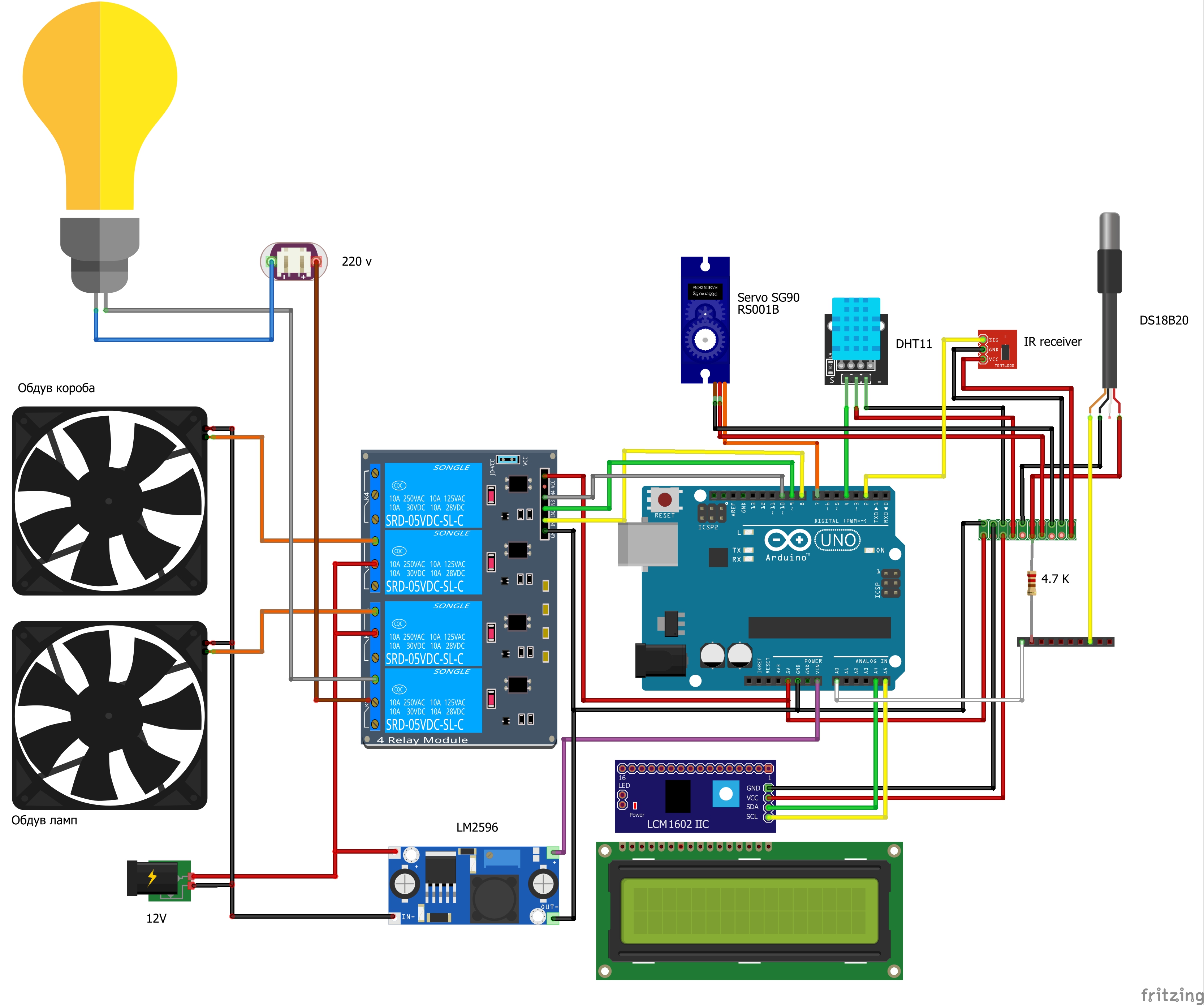
ЧАСТЬ 2 — Схема
Схема проста. Подключите контакты i2c от Arduino к контактному кольцу. От контактного кольца до датчика расстояния VL53L0. Затем подключите 5V и контакт D8 к датчику Холла. Подключите разрешение, шаг и направление к драйверу шагового двигателя, а двигатель к драйверу. Теперь подключите 5 В к повышающему преобразователю и установите выход на 12 В и подключите его к входу питания драйвера шагового двигателя. Вот и все. В качестве источника питания я использую USB-кабель, подключенный к Arduino.
Вот и все. В качестве источника питания я использую USB-кабель, подключенный к Arduino.
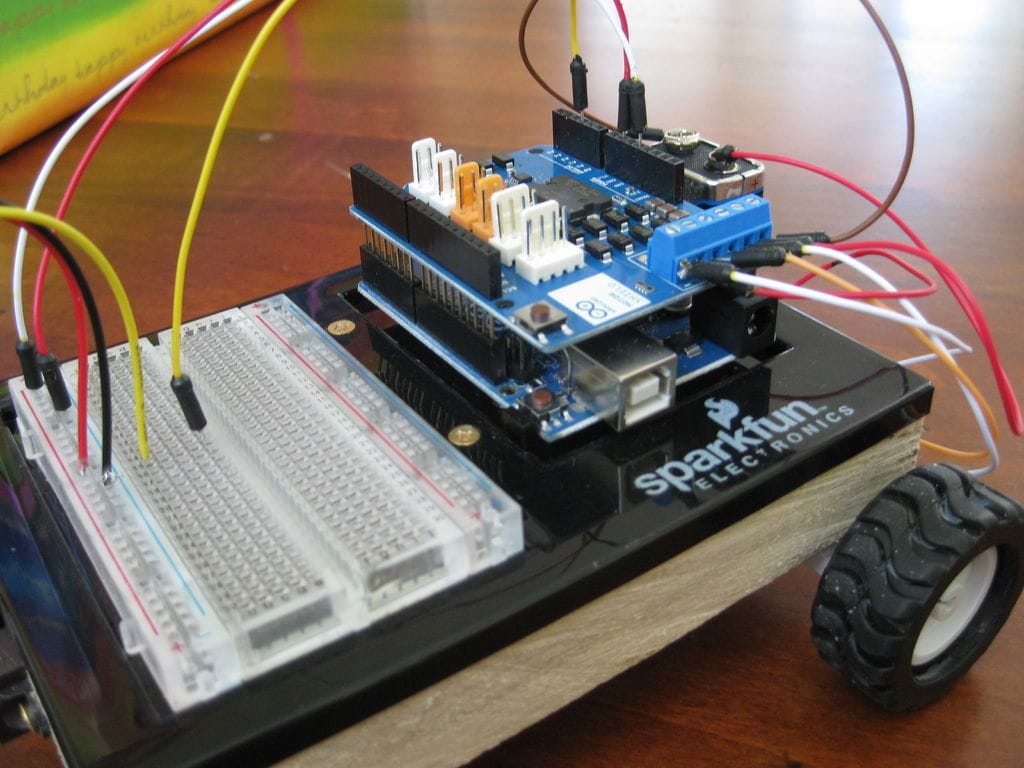
ЧАСТЬ 3. Установка всего
Загрузите файлы 3D stl, указанные выше, из списка деталей. Распечатайте корпус с 2 периметрами, высотой слоя 0,3 мм, материалом PLA и заполнением 20%. Теперь у нас есть корпус, вращающийся диск и шкив. Мы можем установить все внутри, так что давайте посмотрим.
Хорошо, теперь возьмите контактное кольцо и поместите его на верхнюю часть корпуса. Убедитесь, что вращающаяся часть кольца находится на верхней стороне корпуса, чтобы оно вращалось одновременно с диском. Теперь добавьте шаговый двигатель, используя 2 винта и гайки 3M. Не готова верхняя часть корпуса и у нас есть провода от контактного кольца на внутренней стороне корпуса.
Хорошо, теперь мы можем добавить большой подшипник в верхнюю часть корпуса. Затем пропустите провода от контактного кольца через отверстие вращающегося диска. Как только вы это сделаете, припаяйте 4 провода к датчику расстояния для 5V, GND, данных и часов связи i2c.
