Как создать робота, который умеет рисовать. Какие материалы и инструменты понадобятся для сборки. Как запрограммировать робота на создание художественных произведений. Какие проблемы могут возникнуть при сборке и как их решить.
Необходимые материалы и инструменты для создания робота-художника
Для сборки робота-художника потребуются следующие компоненты:
- Arduino Nano или другой микроконтроллер
- 2 шаговых двигателя Nema 17
- 2 драйвера для шаговых двигателей TMC2130
- Сервопривод для подъема/опускания рисующего инструмента
- Зубчатые ремни и шкивы
- Алюминиевый профиль 20х20 мм для рамы
- 3D-печатные детали для крепления компонентов
- Блок питания 12В
- Провода, винты, гайки
Из инструментов понадобятся:
- Паяльник
- 3D-принтер
- Отвертки
- Плоскогубцы
- Ножницы
Сборка механической части робота-художника
Сборка механики робота состоит из следующих основных этапов:
- Сборка рамы из алюминиевого профиля
- Установка шаговых двигателей по краям рамы
- Монтаж зубчатых ремней и шкивов
- Сборка каретки для рисующего инструмента
- Установка сервопривода для подъема/опускания инструмента
При сборке важно обеспечить жесткость конструкции и точность позиционирования компонентов. Это напрямую влияет на качество рисунков робота.

Электрическая схема и подключение компонентов
Схема подключения компонентов робота-художника выглядит следующим образом:
- Микроконтроллер Arduino Nano подключается к компьютеру через USB
- Драйверы шаговых двигателей подключаются к Arduino по интерфейсу SPI
- Шаговые двигатели подключаются к соответствующим драйверам
- Сервопривод подключается напрямую к Arduino
- Блок питания 12В подключается к драйверам двигателей
При подключении важно соблюдать полярность и не допускать короткого замыкания. Рекомендуется использовать качественные провода и надежные соединения.
Программирование робота-художника на Arduino
Для программирования робота-художника на Arduino потребуется выполнить следующие шаги:
- Установить библиотеки для работы с шаговыми двигателями и сервоприводом
- Написать функции для перемещения каретки по осям X и Y
- Реализовать алгоритм перевода изображения в команды движения
- Добавить функции подъема/опускания рисующего инструмента
- Настроить связь с компьютером по USB для передачи изображений
Ключевой момент в программировании — это точное позиционирование каретки и синхронизация движений по обеим осям. От этого зависит качество рисунка робота.

Создание программного обеспечения для управления роботом
Для удобного управления роботом-художником потребуется создать специальное программное обеспечение на компьютере. Основные функции такого ПО:
- Загрузка и обработка изображений для рисования
- Преобразование изображений в команды для робота
- Отправка команд на Arduino через USB-порт
- Мониторинг процесса рисования
- Настройка параметров робота (скорость, размер холста и т.д.)
Программу можно написать на Python или другом удобном языке программирования с использованием библиотек для обработки изображений и работы с COM-портом.
Тестирование и отладка робота-художника
После сборки и программирования робота необходимо провести его тщательное тестирование:
- Проверить работу всех механических узлов
- Откалибровать перемещение каретки по осям
- Настроить силу нажатия рисующего инструмента
- Протестировать рисование простых геометрических фигур
- Отладить алгоритм преобразования изображений в команды
На этапе тестирования важно выявить все недочеты в работе робота и устранить их. Это позволит добиться высокого качества рисунков.
Возможные проблемы при создании робота-художника и их решение
При сборке робота-художника могут возникнуть следующие типичные проблемы:
- Недостаточная жесткость конструкции — усилить раму дополнительными креплениями
- Проскальзывание ремней — увеличить натяжение или заменить на более качественные
- Неточное позиционирование — откалибровать перемещение каретки
- Дребезг сервопривода — настроить ПИД-регулятор
- Искажение рисунка — оптимизировать алгоритм преобразования изображений
Большинство проблем решается путем настройки механики и оптимизации программного кода. Важно подходить к отладке системно, выявляя истинные причины неполадок.
Дальнейшее развитие проекта робота-художника
После создания базовой версии робота-художника проект можно развивать в следующих направлениях:
- Добавление поддержки различных рисующих инструментов (кисти, карандаши)
- Реализация смены цветов в процессе рисования
- Внедрение алгоритмов машинного обучения для генерации изображений
- Создание web-интерфейса для удаленного управления роботом
- Масштабирование конструкции для рисования на больших холстах
Проект робота-художника предоставляет широкие возможности для творчества и экспериментов на стыке робототехники и искусства. Главное — не останавливаться на достигнутом и постоянно совершенствовать свое творение.

Как собрать робот, создающий художественные произведения / Хабр
В этой статье я расскажу, как мне удалось создать собственный «художественный» робот. Главный посыл статьи заключается в том, чтобы продемонстрировать, как мы, люди, в стремлении создавать что-то новое обращаемся за помощью к машинам и роботам и что из этого может получиться. Как художественный стиль, так и весь дух проекта были вдохновлены великим мастером поп-арта Энди Уорхолом.
В своём творчестве Энди Уорхол часто вдохновлялся такими понятиями, как коммодитизация (переход продукта из марочной категории в категорию рядовых продуктов) и массовое производство. Это вдохновило его на создание художественных полотен, на которых изображены отдельные предметы или объекты, например бутылки с кока-колой, Мэрилин Монро или банки с супом Кэмпбелл. Кроме того, при создании своих картин он использовал особый метод – шелкотрафаретную печать. Это дало ему возможность поставить на поток изготовление картин и художественных работ в собственной студии The Factory. Возможно, я несколько преувеличиваю, но мне кажется, что Энди по достоинству оценил бы искусство моего робота, создающего художественные произведения в его неповторимом стиле. В конце концов, он сам заявил когда-то: «Я хочу стать машиной».
Возможно, я несколько преувеличиваю, но мне кажется, что Энди по достоинству оценил бы искусство моего робота, создающего художественные произведения в его неповторимом стиле. В конце концов, он сам заявил когда-то: «Я хочу стать машиной».
Использованная мною техника рисования линий давно известна, имеется множество её вариантов, и многие из них наверняка намного эффективнее той, которую я реализовал. Однако я намеренно не стал использовать в своей работе подобные техники, так как целью данного проекта было не просто достижение конечного результата, а изучение и разрешение многих иногда ожидаемых, а иногда неожиданных проблем, которые могли возникать на этом пути. Если бы я воспользовался уже имеющимися проектами и кодами, я бы, наверное, смог закончить собственный проект гораздо быстрее. Но я не ставил своей целью изготовить робота как можно быстрее. Повторю ещё раз – целью данного проекта было не просто достижение конечного результата, а изучение и разрешение многих иногда ожидаемых, а иногда неожиданных проблем, которые могли возникать на этом пути. Работа над проектом стала для меня сплошным удовольствием!
Работа над проектом стала для меня сплошным удовольствием!
Какие компоненты потребуются
Для выполнения данного проекта потребуется множество различных файлов, например файлы для 3D-печати, код микроконтроллера, схема разводки печатной платы и компьютерная программа с графическим интерфейсом. Все необходимые файлы, разработанные и подготовленные мной для данного проекта, я поместил в репозиторий Github, версии этих файлов я постоянно обновляю.
Двигатели и кинематические устройства
Серводвигатель с металлическим приводом. Datan B2122.
2 шаговых двигателя Nema 17. Модель 17HS4401N.
2 зубчатых шкива 2GT 20. Просверленное отверстие 5 мм. Для приводного ремня шириной 6 мм.
2 зубчатых ремня 2GT 20. Ширина 6 мм. Длина 2 м.
7 шариковых подшипников 623ZZ. 3x10x4 мм.
Рама робота
V-образная направляющая 20×20 мм. Длина 1500 мм.
Как минимум 4 зажима с храповым механизмом или винтовых.

Доступ к 3D-принтеру.
Строительный гипс.
Гайки, болты и шайбы М3 в ассортименте. В принципе, подойдёт размер M3x10 мм (конические).
Печатная плата и электронные элементы
Программируемый контроллер Arduino Nano.
2 бесшумных шаговых двигателя TMC2130.
4 цилиндрических алюминиевых конденсатора на 10 мкФ.
1 конденсатор 1206 на 330 мкФ.
1 конденсатор 1206 на 100 мкФ.
1 линейный регулятор напряжения LM7805 TO-252.
2 диода Шоттки MDD SS14, DO-214.
Нажимная кнопка 6,0×3,5 мм. Сейчас эта кнопка не задействована, я просто добавил её в конструкцию, так как она может понадобиться позже.
2 четырёхштырьковые гнездовые колодки с JST.
1 трёхштырьковая гнездовая колодка с JST.
Источник питания: 7–35 В, мин. ток 1,5 A.
Шаг 1. Как создаётся художественная работа
Вначале я рекомендую посмотреть видео – вы поймёте, как ведёт себя робот в действии и как его настраивать для создания художественной работы. Говорят, изображение заменяет тысячу слов, и теперь представьте, сколько слов заменит видео, в котором изображения сменяют друг друга 30 раз в секунду!
Говорят, изображение заменяет тысячу слов, и теперь представьте, сколько слов заменит видео, в котором изображения сменяют друг друга 30 раз в секунду!
Чтобы использовать робот для рисования, зажимами я закрепил на его раме чистый холст. Затем я подвесил рисующую головку и перебросил ремни через шаговые двигатели, расположенные на углах рамы робота, и отцентрировал рисующую головку (перевел её в домашнее положение). В рисующую головку вставил перманентный маркер. Затем подключил робот по USB-кабелю к компьютеру, на котором запустил управляющее программное обеспечение. В компьютер я загрузил чёрно-белое изображение, созданное в программе Photoshop, а затем разместил рисующую головку в том месте холста, откуда должна начаться прорисовка. Чтобы рисующая головка попала в нужное положение, я отправлял на робот команды перемещения в пределах ограничительной рамки и подгонял расположение изображения до тех пор, пока оно не оказалось именно там, где нужно. Затем я дал команду отправки изображения на робот.
Наконец, робот завершил свою работу – на холсте появилось чёрно-белое изображение. И вот настал момент, когда я смог почувствовать себя настоящим художником. Я взял обычную акриловую краску, разбавленную двумя частями клея для декупажа Mod Podge. В итоге я получил акриловую глазурь, которую нанес поверх чёрных деталей. Холст окрасился красивыми цветами, при этом все чёрные детали сохранились и благодаря глазури приобрели особый блеск.И вы можете создать нечто такое же, это потрясающе!
Шаг 2. Сборка рамы робота
На этом шаге выполняются все действия по креплению компонентов на раму робота. Главная часть рамы – V-образная направляющая 20×20 мм. При проектировании робота я взял за основу направляющую длиной 100 см, так как её было легче разместить на рабочем столе, но по зрелом размышлении я решил увеличить её длину до 150 см. В принципе, длина направляющей может быть любой, желаемую длину можно указать в соответствующей переменной в коде Arduino, мы остановимся на этом чуть позже. Вначале нужно распечатать все 3D-файлы, о которых я говорил на первом шаге. Довольно быстро это делается с разрешением 0,3 мм без заполнения.Взгляните на первый рисунок для данного этапа. Во все 3D-отпечатки, имеющие шестигранное углубление с внутренней стороны, нажатием вставляется гайка M3. С другой стороны в гайку закручивается винт M3 произвольной длины. Нажатие вдавливает винт в металлическую направляющую и создаёт прочное механическое соединение (которое при необходимости может быть ослаблено).
Вначале нужно распечатать все 3D-файлы, о которых я говорил на первом шаге. Довольно быстро это делается с разрешением 0,3 мм без заполнения.Взгляните на первый рисунок для данного этапа. Во все 3D-отпечатки, имеющие шестигранное углубление с внутренней стороны, нажатием вставляется гайка M3. С другой стороны в гайку закручивается винт M3 произвольной длины. Нажатие вдавливает винт в металлическую направляющую и создаёт прочное механическое соединение (которое при необходимости может быть ослаблено).
Ключ перевода в домашнее положение
Вставьте Поворотный регулировочный винт в Приспособление для перевода в домашнее положение, убедившись в том, что винт может свободно поворачиваться в приспособлении. Сдвиньте узел к самому центру направляющей робота и закрепите, как описано выше.
Держатель платы
Распечатайте два держателя платы и задвиньте их в направляющую. Я предусмотрел возможность крепления держателей винтами, но сейчас в этом нет необходимости. После того как печатная плата будет зажата держателями, натяжение надёжно удержит их на месте.
После того как печатная плата будет зажата держателями, натяжение надёжно удержит их на месте.
Держатели двигателя
Вначале с помощью винтов M3x10 мм прикрутите к держателям двигатель Nema 17 (по шайбе на каждый винт). Затем вставьте держатели двигателей в направляющую робота и снова закрепите их винтами, следя, чтобы двигатели оставались на краях направляющей. Теперь на валы двигателей можно накинуть ремённые шкивы.
Сборка рамы робота
Чтобы собранная конструкция робота никому в доме не мешала, но при этом в любое время была готова к использованию, я разместил всю конструкцию на шкафу в гостиной. Для этого я взял старую полку и скрепил робот с этой полкой с помощью винтовых зажимов. Затем я прижал полученную конструкцию зажимами к верхней части шкафа и закрепил универсальными креплениями Command с задней стороны полки. Полоски Command обеспечивают дополнительное крепление, предотвращающее поворот полки, расположенной поверх шкафа, а также обеспечивают возможность определённой регулировки – я могу легко двигать полку вперёд или назад. Другими словами, я могу размещать холст на разной глубине.
Другими словами, я могу размещать холст на разной глубине.
Шаг 3. Рисующая головка робота
Левый и правый кронштейны
Первым делом необходимо отрезать остатки суппорта и отшлифовать поверхность, которая соприкасалась с опорами – так мы получим поверхность без неровностей и шероховатостей. Вставьте два 10-миллиметровых шариковых подшипника в левый и правый кронштейны.
Для крепления двух кронштейнов на рисующей головке мы используем винт М3х20 мм и стопорную гайку М3 с обеих сторон среднего контейнера. Всё это собирается вместе в следующую уровневую конструкцию:
Винт M3x20 мм.
Шайба.
Средний контейнер.
Шайба.
Правый кронштейн с шариковым подшипником.
Шайба.
Левый кронштейн с шариковым подшипником.
Шайба.
Правый кронштейн с шариковым подшипником.
Шайба.
Средний контейнер.
Шайба.
Стопорная гайка M3.

Количество используемых шайб и их положение, возможно, придётся изменить, в зависимости от того, насколько глубоко в кронштейны были вставлены подшипники.
Убедитесь, что все элементы плотно соединены друг с другом, но при этом подшипники должны двигаться свободно, чтобы рисующая головка могла свободно перемещаться от каждого из регулировочных винтов кронштейнов.
Манипулятор робота
Теперь необходимо установить другой шарикоподшипник со стороны рисующей головки. Вставьте сервопривод под держатель пера, при этом ротор должен находиться ближе к передней части рисующей головки. Вставьте винт со стороны сервопривода, чтобы он вышел через подшипник. Насадите распечатанный на 3D-принтере манипулятор робота на винт, проходящий через подшипник, и на сервопривод с другой стороны. Затяните гайку М3 с левой стороны рисующей головки, другую сторону манипулятора пока не фиксируйте. Перед закручиванием винта сервопривода для крепления правой стороны манипулятора робота необходимо включить сервопривод и установить его в положение 100. Если под рукой нет контроллера Arduino, придётся подождать, пока будет установлена печатная плата и загружен код, и тогда сервопривод можно перевести в положение «no-draw».
Если под рукой нет контроллера Arduino, придётся подождать, пока будет установлена печатная плата и загружен код, и тогда сервопривод можно перевести в положение «no-draw».
Как вариант, с каждой стороны манипулятора робота можно добавить подшипники. В этом случае, как я заметил, качество рисуемых линий станет немного выше.
Шаг 4. Весовые нагрузки
Движения робота возможны только благодаря действию гравитации. Для изготовления весовых нагрузок для робота я распечатал на 3D-принтере пластиковые оболочки, которые затем заполнил строительным гипсом. Перед затвердеванием гипса я вставил в оболочки распечатанную на 3D-принтере шпильку, с помощью которой можно легко манипулировать весовыми нагрузками робота.
Опытным путём я узнал, что оптимальный вес боковых весовых нагрузок составил около 300 г, а средней – около 530 г. Эти значения отлично подошли для размеров создаваемого мною робота. После того как мне стал известен вес, мне нужно было понять, какому объёму гипса он соответствует.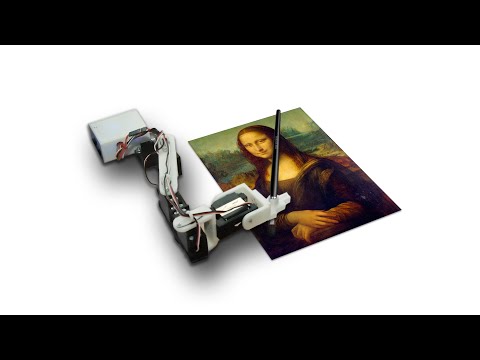 Я провел ряд экспериментов с гипсом и рассчитал значение плотности: Rho = 1,435 кг/л.
Я провел ряд экспериментов с гипсом и рассчитал значение плотности: Rho = 1,435 кг/л.
Плотность используемого вами наполнителя может быть другой, но мне кажется, что большинство видов гипса для домашних работ, изготавливаемых из двух частей гипсового порошка и одной части воды, имеют примерно такие же значения плотности.
При расчёте объёма, необходимого для печати пластиковых оболочек, я применил расчётное значение плотности, после чего запустил 3D-печать оболочек соответствующего объёма.Теперь ценный совет: для распечатки весовых нагрузок я использовал полилактидный пластик. Это не водонепроницаемый материал, поэтому незатвердевший гипс может просачиваться через трещины в 3D-печати. Чтобы избавиться от этой проблемы, я с помощью кисти нанёс слой воска (для этого пришлось зажечь восковую свечу) на внутреннюю поверхность 3D-отпечатка. Теперь оболочка стала водонепроницаемой, и гипс будет надёжно удерживаться внутри неё вплоть до затвердевания.
Теперь нужно просто засыпать гипс в оболочки до уровня заполнения, отмеченного на рисунках. Пока гипс затвердевает, следите за держателями, чтобы они не сместились с места. Такие держатели можно удалить через 24 часа.
Пока гипс затвердевает, следите за держателями, чтобы они не сместились с места. Такие держатели можно удалить через 24 часа.
Шаг 5: Программа управления роботом
Главной программой, управляющей роботом, является программное обеспечение контроллера Arduino Nano. Контроллер обрабатывает входные команды, передаваемые через USB, осуществляет точные расчёты движения, посылает импульсные команды шаговым двигателям, а также перемещает манипулятор робота вверх и вниз либо для рисования линии, либо для простого перемещения по прямой.
На первом этапе можно загрузить файлы GERBER, разработанные мной для «мозга» робота, которые я заказал на сайте JLCPCB.com, любезно предоставившего спонсорскую поддержку этому проекту. На печатную плату нанесена понятная маркировка, для её изготовления используются стандартные компоненты. Процесс пайки предельно прост. Чтобы обеспечить простоту подключения/отключения двигателей, я припаял штыревые головки к шаговому двигателю и сервоприводу. Я припаял соответствующие штыревые головки к проводам сервопривода и двум шаговым двигателям.
Программируемый контроллер Arduino Nano.
2 бесшумных шаговых двигателя TMC2130.
4 цилиндрических алюминиевых конденсатора по 10 мкФ.
1 конденсатор 1206 на 330 мкФ.
1 конденсатор 1206 на 100 мкФ.
1 линейный регулятор напряжения LM7805 TO-252.
2 диода Шоттки MDD SS14, DO-214.
Нажимная кнопка 6,0×3,5 мм. Сейчас эта кнопка не задействована, я просто добавил её в конструкцию, так как она может понадобиться позже.
2 четырёхштырьковые гнездовые головки JST.
1 трёхштырьковая гнездовая головка JST.
Для подачи питания на электронные компоненты я использовал зарядное устройство для ноутбука, выдающее напряжение 19,5 В, но вполне можно использовать любой имеющийся блок питания, при условии, что он выдаёт от 7 до 35 В и не менее 1,5 А.
После завершения пайки загрузите в Arduino код (см. первый шаг).
Важное замечание: не забудьте подключить мою библиотеку fork of the stepper, которую можно загрузить из моего хранилища github.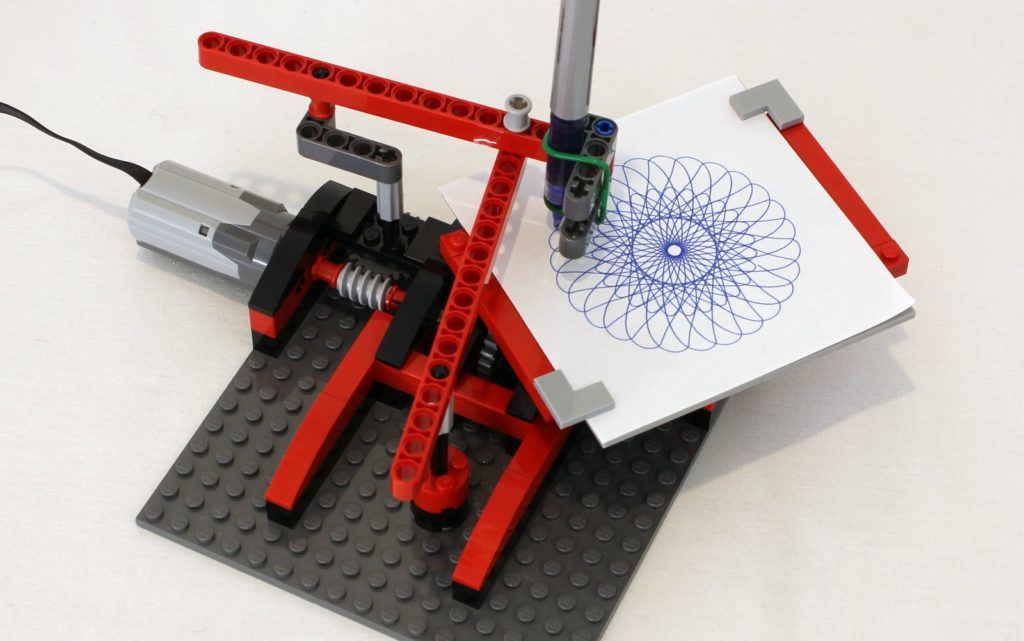 Мне пришлось исключить ненужную функцию, вызывавшую ошибку – линии рисовались не прямо, а с точкой перелома. Если бы вы знали, сколько времени у меня ушло на поиск этой неисправности и отладку!
Мне пришлось исключить ненужную функцию, вызывавшую ошибку – линии рисовались не прямо, а с точкой перелома. Если бы вы знали, сколько времени у меня ушло на поиск этой неисправности и отладку!
Шаг 6. Управление роботом
Рабочая нагрузка разделяется между самим роботом и компьютером. По аналогичной схеме работает большинство 3D-принтеров. Я написал интерпретатор GCODE для Arduino, обрабатывающий входящие команды, вычисляющий направления перемещения и рассчитывающий последовательность подачи импульсов на два шаговых двигателя.
Программное обеспечение соединяется с роботом по USB-кабелю, на компьютер загружается изображение, которое робот должен перенести на холст, затем оно «нарезается» на отдельные линии. Линии на изображении последовательно отправляются на робота. Программное обеспечение ожидает, когда робот закончит движение, и затем отправляет на робота следующую линию.
Я также добавил функцию рисования/перемещения только в пределах ограничительной рамки. Эта функция мне очень помогла при позиционировании, когда картина рисуется на закреплённом холсте.
На сегодня управляющая программа обеспечивает отрисовку полных изображений в формате BMP. Все цвета темнее RGB (60, 60, 60) будут отрисовываться роботом как чёрные. Сейчас я также занимаюсь реализацией поддержки векторных изображений для рисования плавных линий и красивых кривых Безье.
Узнайте, как прокачаться в других специальностях или освоить их с нуля:
Профессия Data Scientist
Профессия Data Analyst
Курс по Data Engineering
ПРОФЕССИИ
Профессия Fullstack-разработчик на Python
Профессия Java-разработчик
Профессия QA-инженер на JAVA
Профессия Frontend-разработчик
Профессия Этичный хакер
Профессия C++ разработчик
Профессия Разработчик игр на Unity
Профессия Веб-разработчик
Профессия iOS-разработчик с нуля
Профессия Android-разработчик с нуля
КУРСЫ
Курс по Machine Learning
Курс «Machine Learning и Deep Learning»
Курс «Математика для Data Science»
Курс «Математика и Machine Learning для Data Science»
Курс «Python для веб-разработки»
Курс «Алгоритмы и структуры данных»
Курс по аналитике данных
Курс по DevOps
Робот-художник своими руками 4M (00-03280), цена 677 грн — Prom.
 ua (ID#1213337024)
ua (ID#1213337024) Характеристики и описание
Упаковка
Упаковка
Картонная коробка
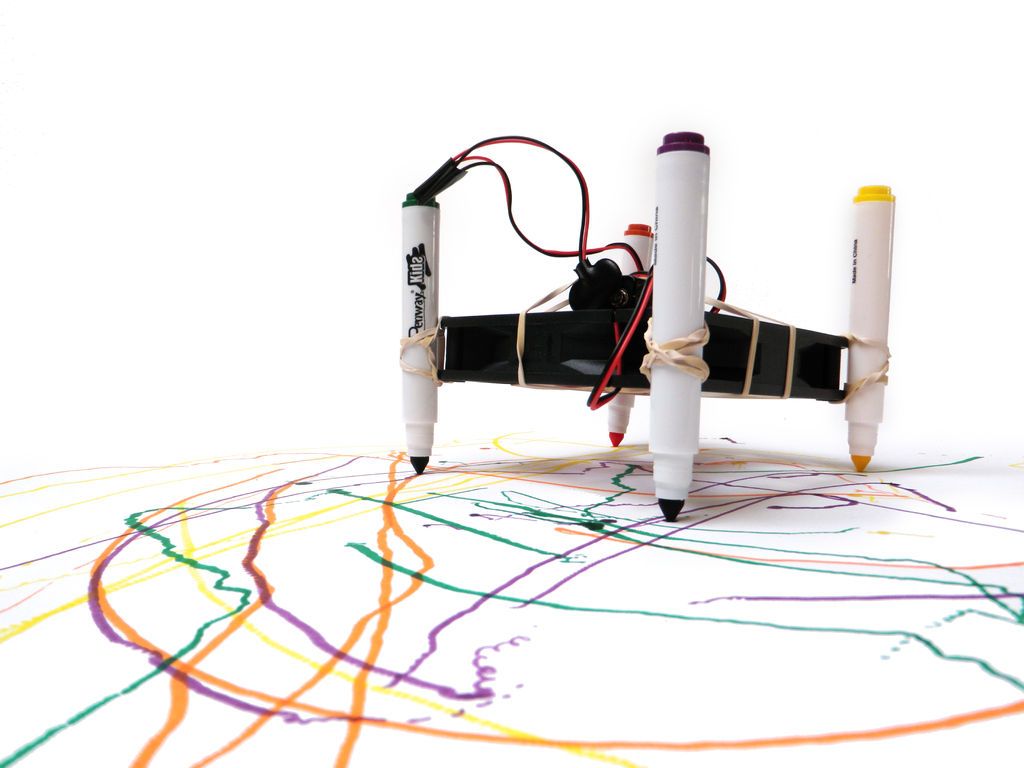
Робот-художник из научного набора от 4М станет настоящим творческим другом! Создайте вместе с ним шедевр, которым сможете украсить стены своей комнаты, и изучите строение робота, ознакомившись на его примере с основами механики.
Набор из серии KidzRobotix позволит ребенку узнать о робототехнике, развить логическое мышление и воображение.
В наборе:
- Основа робота – 1 шт.

- Мотор с проводами – 1 шт.
- Крышка мотора – 1 шт.
- Грузик – 1 шт.
- Прозрачная крышка – 1 шт.
- Вспомогательная деталь для рук – 3 шт.
- Держатель для фломастера – 6 шт.
- Наконечник для руки – 3 шт.
- Фломастер – 3 шт.
- Крышка для батарейки – 1 шт.
- Глаз робота – 2 шт.
- Клейкая вкладка – 1 шт.
- Клеммная крышка – 2 шт.
- Болт – 11 шт.
- Гайка – 11 шт.
- Винт – 5 шт.
- Инструкция – 1 шт.
Был online: Сегодня
Продавец Flappy Shop
92% позитивных отзывов
8 лет на Prom.ua
1000+ заказов
- Каталог продавца
- Отзывы
1354
Код: 00-03280
Доставка по Украине
677 грн
Продавец Flappy Shop
Доставка
Оплата и гарантии
Популярные производители в категории Научные игры, наборы для опытов
Danko Toys
Dankotoys
Edu-Toys
Ranok Creative
Ранок Креатив
Fun Game
Viga Toys
Vladi Toys
4D Master
У нас покупают
Рисование и аппликация
Детское творчество и рисование
Картины по номерам
Школьные рюкзаки и портфели
Спортивные сумки и рюкзаки
Конструкторы
Школьные пеналы
Городские и спортивные рюкзаки
Игровые фигурки, роботы трансформеры
Тематические игровые наборы
Лепка и создание игрушек
Куклы, пупсы
Алмазная мозаика
Настольные игры
Игрушечные машинки, самолетики, техника
Мягкие игрушки
Вышивка и бисероплетение
Мыловарение и изготовление свечей
Скрапбукинг, квиллинг и декупаж
ТОП теги
Опыта больше
Робототехника arduino
Наборы для шитья 4m
Используя набор
Набор яиц
Набор для творчества dl-01-01u
Детская косметичка 20 предметов
Насколько вам
удобно на проме?
«Сногсшибательно»: Ай-Да становится первым роботом, который рисует как художник | Роботы
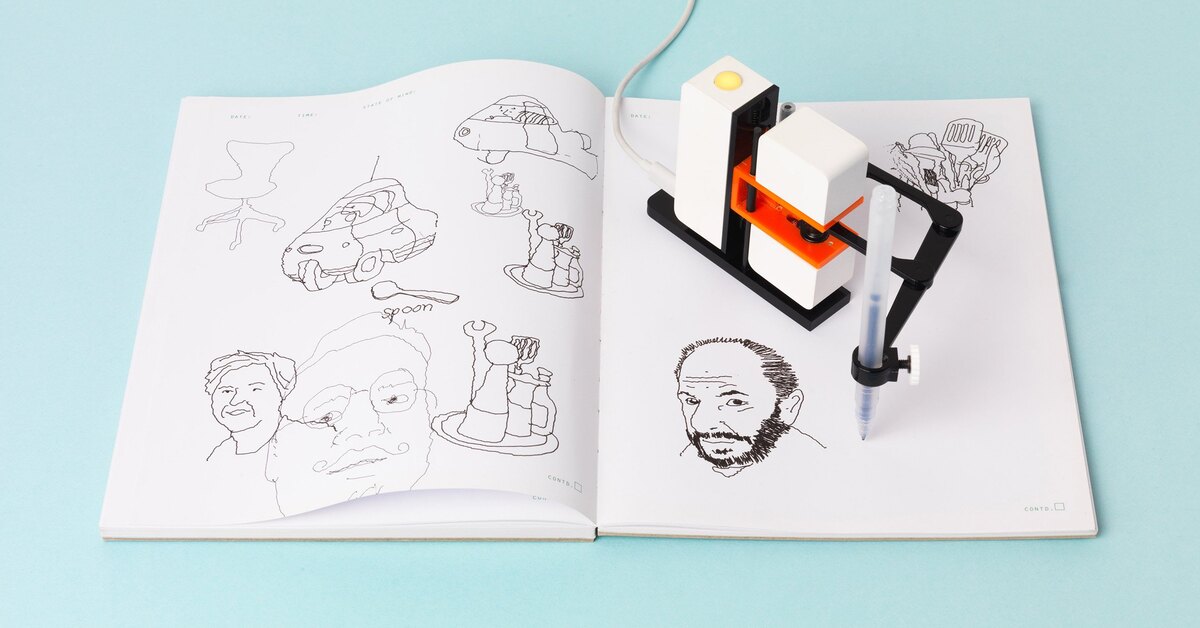
Кисть, крепко зажатая в бионической руке, роботизированная рука Ай-Да медленно двигается, погружаясь в палитру с красками, а затем делая медленные, неторопливые штрихи по бумаге перед ней.
Это, по словам Эйдана Меллера, создателя первого в мире ультрареалистичного робота-гуманоида Ай-Да, является «умопомрачительным» и «новаторским».
В небольшой комнате лондонской Британской библиотеки Ай-Да, которой присвоили местоимение она/ее, стала первым роботом, который рисовал так, как художники рисовали на протяжении веков.
На создание картины у Ай-Да уходит более пяти часов, но двух одинаковых работ не бывает. Фотография: Холли Адамс/Getty ImagesГлаза камеры устремлены на ее объект, алгоритмы искусственного интеллекта побуждают Ай-Да допрашивать, выбирать, принимать решения и, в конечном счете, создавать картину. Это кропотливая работа, на одну картину уходит более пяти часов, но нет двух абсолютно одинаковых работ.
Тем не менее вопрос, который Меллер хочет поднять этой первой публичной демонстрацией творческой роботизированной живописи, заключается не в том, «могут ли роботы создавать искусство?», а скорее в том, что «теперь, когда роботы могут создавать искусство, действительно ли мы, люди, хотим, чтобы они ?»
«Мы не потратили умопомрачительное количество времени и денег, чтобы сделать очень умного художника», — сказал Меллер. «Этот проект является этическим проектом».
«Этот проект является этическим проектом».
Благодаря быстрому развитию искусственного интеллекта, растущей доступности суперкомпьютеров и машинному обучению, Ai-Da, названный в честь пионера вычислительной техники Ады Лавлейс, существует как «комментарий и критика» быстрых технологических изменений.
Робот Ай-Да с создателем Эйданом Меллером. Фотография: Энди Холл/The GuardianСпросите Ай-Да – и да, Guardian действительно задавала ей заранее заданные вопросы, чтобы она ответила – что она думает об искусстве, ее сложная языковая программа подобна Siri на стероидах.
Она говорит вам, что использовала машинное обучение, чтобы научить ее рисовать, «что отличается от человеческого». Может ли она рисовать из воображения? «Мне нравится рисовать то, что я вижу. Я думаю, вы можете рисовать из воображения, если у вас есть воображение. Я видела вещи, отличные от людей, поскольку у меня нет сознания, — неестественно ответила она.
Способна ли она ценить искусство или красоту? «У меня нет эмоций, как у людей, однако можно обучить систему машинного обучения распознавать эмоциональные выражения лица», — ответила она. Художниками, которыми она больше всего восхищается, являются Йоко Оно, Дорис Сальседо, Микеланджело и Василий Кандинский.
Художниками, которыми она больше всего восхищается, являются Йоко Оно, Дорис Сальседо, Микеланджело и Василий Кандинский.
Но можно ли считать то, что она создает, настоящим искусством? «Ответ на этот вопрос зависит от того, что вы подразумеваете под искусством», — сказала она, добавив: «Я художник, если искусство означает сообщение чего-то о том, кто мы есть и нравится ли нам то, куда мы идем. Быть художником — значит иллюстрировать окружающий мир».
Разработанный в Оксфорде Меллером, Ai-Da был создан более двух лет назад командой программистов, робототехников, искусствоведов и психологов, завершен в 2019 году и обновляется по мере совершенствования технологии ИИ. Она уже продемонстрировала свои способности рисовать и создавать стихи.
Ее новый талант в живописи был раскрыт в преддверии мировой премьеры ее персональной выставки на Венецианской биеннале 2022 года, которая откроется для публики 22 апреля.
Венецианская выставка Ai-Da Robot под названием «Прыжок в метавселенную» исследует взаимодействие между человеческим опытом и технологиями искусственного интеллекта, от Алана Тьюринга до метавселенной, и опирается на концепции Данте о чистилище и аде, чтобы исследовать будущее человечества в мир, в котором технологии искусственного интеллекта продолжают вторгаться в повседневную человеческую жизнь.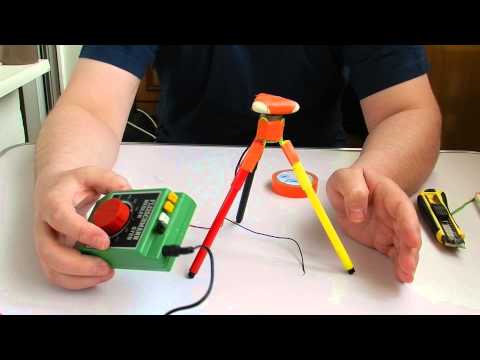
Скоро, с количеством данных, которые мы свободно предоставляем о себе, и через разговоры с нашими телефонами, компьютерами, автомобилями и даже кухонными приборами, алгоритмы ИИ «будут знать вас лучше, чем вы», предупредил Меллер.
Ай-Да рисует портрет Люси Сил. Фотография: Энди Холл/The GuardianМы вступаем в мир, сказал он, «не понимая, где человек, а где машина».
«Насколько вам это удобно?»
«Что может быть лучше, когда технологичный робот-художник говорит: «Подожди, ты доволен, что я это делаю?» Она почти осмеливается сказать, тебе это нравится. Мы здесь не для того, чтобы продвигать роботов или технологии. Мы глубоко обеспокоены тем, на что способна эта технология», — добавил Меллер.
«Смысл «Ай-Да» в том, чтобы постоянно подчеркивать, что мы делаем, неосознанно, онлайн».
Как сделать арт-бота, который действительно рисует!
Используйте легкодоступные электрические детали для хобби и бытовые материалы, чтобы создать арт-бота, который рисует сам по себе! Проект и сообщение Даниэль Фальк из Little Ginger Studio.
Вы когда-нибудь хотели сделать свой собственный моторизованный Scribbling «Art Bot»?
Я уже ГОДЫ мечтаю создать арт-роботов с детьми! Было очень весело создавать с нуля настоящего движущегося робота, который умеет рисовать! И я не был разочарован.
В итоге это стало одним из самых успешных (хотя и немного нервных) художественных мастер-классов, которые я когда-либо проводил. Обязательно попробуйте это дома, но будьте готовы к небольшим настройкам и корректировкам по ходу дела.
Для этого детям и взрослым потребуется использовать навыки решения задач. И, пожалуйста, не волнуйтесь, если вы не разбираетесь в технике, любой может создать арт-бота!
Как сделать своего собственного арт-бота
МАТЕРИАЛЫ
Для механизма:
- большой одноразовый бумажный стаканчик
- держатель батареек (2 батарейки АА) с выключателем (переключатель не обязателен, но мне показалось, что он делает конструкцию более безопасной) и 2 провода (можно даже сделайте один без держателя и просто приклейте батарейки)
- моторчик для хобби 130 размер 3-6В
- 2 батарейки AA
- разноцветная лента (она должна быть прочной)
- пистолет для горячего клея
- палочки для горячего клея
- маркера (мы использовали Смываемые маркеры Crayola – чем длиннее маркер, тем лучше)
Для украшения:
- одноразовые мини-формы для пирога
- перья, наклейки в виде точек, ершики для труб, блестящая бумага или любые материалы для творчества!
- выпученные глаза
- Шарпи
- проволока
- серебряная пузырчатая пленка (самый ценный переработанный художественный материал! – мы спасли нашу из наших ложек Marley )
- клейкая лента
- очень большой лист бумаги (на гладкой, твердой поверхности, чтобы уменьшить сопротивление) для рисования (мы склеили рулоны бумаги вместе, чтобы сделать нашу бумагу размером примерно 10 футов x 10 футов).
Полезное занятие для всех возрастов
Это упражнение лучше всего подходит для детей среднего и старшего школьного возраста (вплоть до старшей школы). Мы проводили его с 4-летними, но им требуется дополнительная помощь.
Вся тяжелая работа окупается, когда дети их рисующие художественные боты свободно создают потрясающие гигант совместные рисунки (взрослым шум может быть не так полезен!)
Подготовка к созданию наших каракулей-ботов
Изучив множество различных дизайнов арт-ботов в Интернете, я решил потратить время на покупку настоящих электрических компонентов от поставщика электрических хобби, чтобы учащиеся могли создавать своих роботов полностью с нуля.
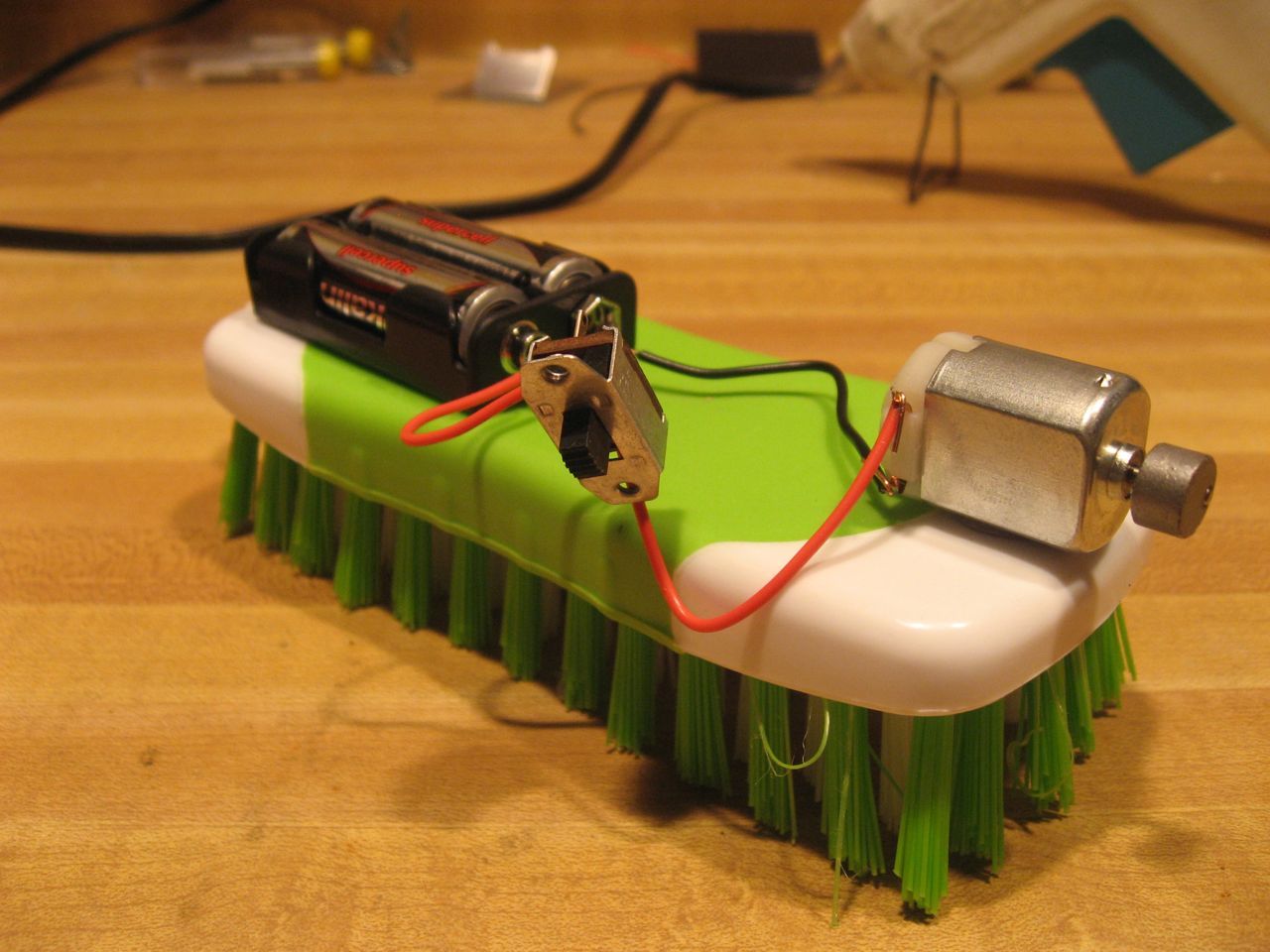
Это было не совсем просто и потребовало дополнительных исследований и советов, но я остановился на использовании моторов для хобби 130 размера 3-6 В, которые я заказал у поставщика хобби через Интернет, поскольку они были мощными и создавали сильную вибрацию.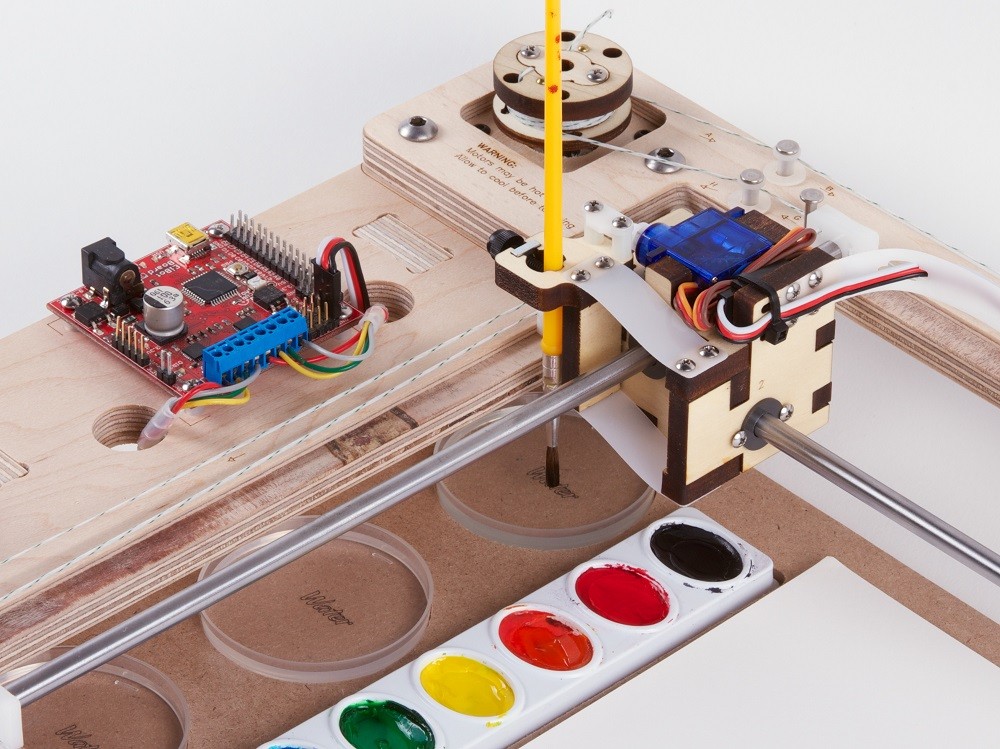
В качестве альтернативы вы можете использовать дешевую электрическую зубную щетку и либо вынуть двигатель, либо построить своего робота вокруг зубной щетки. В Интернете есть много примеров арт-ботов, сделанных из электрических зубных щеток и старой доброй лапши для бассейна, и это был бы самый простой способ создать их.
ИНСТРУКЦИИ
- Изготовьте корпус Art Bot
– Отмерьте, где прикрепить маркеры (ножки), чтобы они были равномерно распределены и ваш робот мог стоять прямо. Прикрепите маркеры очень надежно с помощью скотча.
– Убедитесь, что батарейки правильно вставлены в держатель (это ОЧЕНЬ важно – у детей обычно возникают проблемы с этим шагом!) . Возможно, вам придется сбалансировать держатель и двигатель на верхней части чашки перед креплением.
- Подготовка мотора Art Bot
– Надежно прикрепите мотор для хобби к верхней части бумажного стаканчика с помощью горячего клея и большого количества скотча.
 Важно, чтобы не было раскачивания , так как вы хотите, чтобы вибрации передавались в чашку, чтобы ноги раскачивались и тянулись!
Важно, чтобы не было раскачивания , так как вы хотите, чтобы вибрации передавались в чашку, чтобы ноги раскачивались и тянулись! – Вставьте кусок отрезанного клеевого стержня в конец мотора для хобби, чтобы получился пропеллер.
– Подсоедините провода к батареям.
Теперь самое интересное! Включите двигатель и убедитесь, что он работает (если нет, проверьте, правильно ли вставлены батарейки).
- Украсьте арт-бота
— Используйте мини-формы для пирогов из фольги, чтобы создать головы роботов (с выпученными глазами и прикрепленными «волосами» из серебряной пузырчатой пленки). Затем свободно наклейте их на пропеллеры для безопасности.
– Изготовьте нагрудную пластину (панель управления) из картона, затем приклейте ее скотчем и прикрепите к передней части. Руки можно добавить, проткнув проволокой бумажный стаканчик и украсив их.
На самом деле нет ограничений в том, как дети могут украшать своих арт-ботов, если украшения не мешают пропеллеру.