Как собрать простого робота на Arduino. Какие детали понадобятся для сборки робота на Arduino. Как запрограммировать робота на Arduino. Какие датчики можно использовать в роботе на Arduino. Как подключить двигатели к Arduino.
Необходимые компоненты для сборки робота на Arduino
Для сборки простого робота на Arduino вам понадобятся следующие компоненты:
- Плата Arduino (например, Arduino Uno или Arduino Nano)
- Шасси робота (можно использовать готовое или собрать самостоятельно)
- Два электродвигателя постоянного тока
- Драйвер двигателей (например, L293D или L298N)
- Колеса (2 шт)
- Батарейный отсек для питания
- Провода для соединений
- Макетная плата
- Датчики (по желанию, например, ультразвуковой дальномер HC-SR04)
Давайте рассмотрим назначение основных компонентов. Зачем нужна плата Arduino для робота? Arduino выступает «мозгом» робота — это микроконтроллер, который можно запрограммировать на выполнение различных действий. Шасси робота — это его корпус, на котором крепятся все остальные компоненты. Электродвигатели обеспечивают движение робота. Драйвер двигателей нужен для управления моторами, так как Arduino не может напрямую подавать на них достаточный ток.

Сборка шасси робота
Первый шаг в создании робота — сборка его шасси. Существует несколько вариантов:
- Использовать готовое пластиковое или металлическое шасси. Это самый простой вариант для начинающих.
- Собрать шасси из подручных материалов (например, из фанеры или пластика).
- Напечатать детали шасси на 3D-принтере.
При самостоятельном изготовлении шасси важно предусмотреть места для крепления моторов, колес, платы Arduino и батарейного отсека. Размеры шасси зависят от выбранных компонентов. Обычно длина составляет 15-20 см, ширина — 10-15 см.
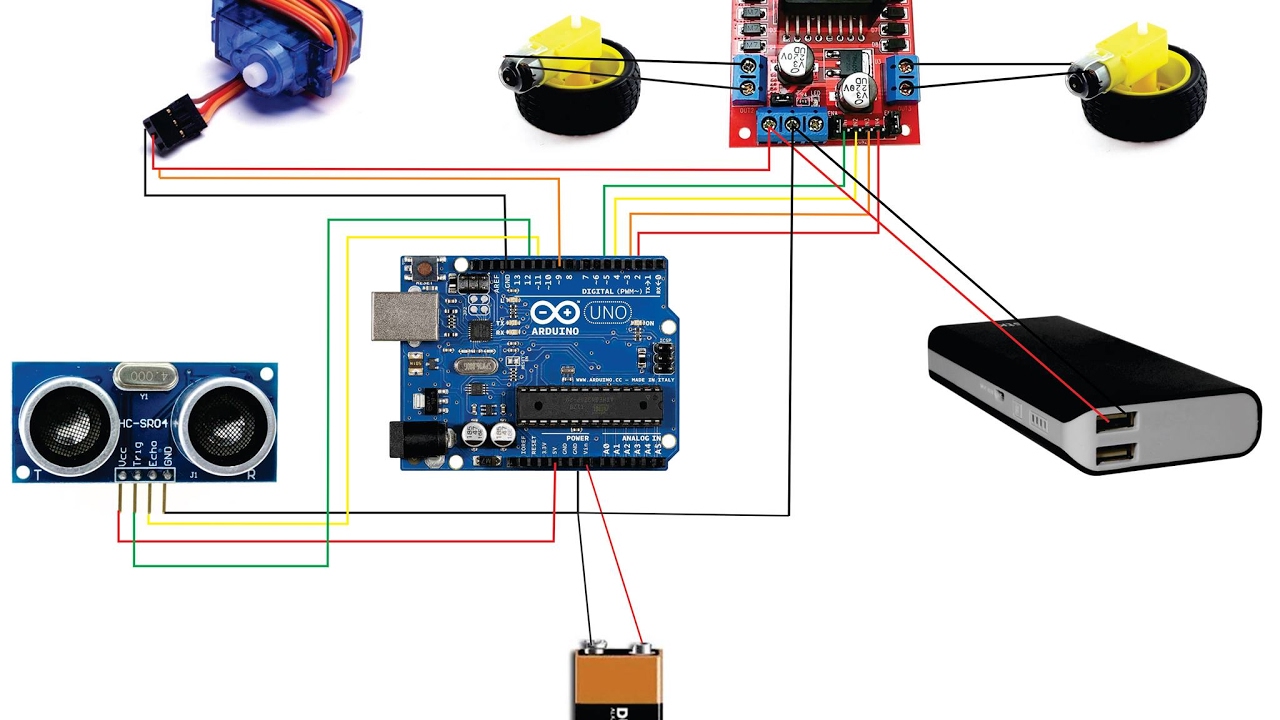
Подключение двигателей к Arduino
Подключение двигателей к Arduino осуществляется через драйвер. Это необходимо, так как Arduino не может напрямую управлять моторами из-за недостаточной силы тока на выходах. Рассмотрим подключение на примере популярного драйвера L293D:
- Подключите выводы 1,2EN и 3,4EN драйвера к цифровым пинам Arduino (например, 9 и 10).
- Выводы 1A, 2A, 3A, 4A подключите к цифровым пинам Arduino (например, 2, 3, 4, 5).
- Выводы 1Y, 2Y подключите к первому мотору, 3Y, 4Y — ко второму.
- Подайте питание на драйвер: GND — на землю, Vs — на 5V от Arduino, Vss — на положительный контакт батарей.
Такое подключение позволит управлять скоростью и направлением вращения моторов через программный код.
Программирование робота на Arduino
Программирование робота осуществляется в среде Arduino IDE. Вот пример простого кода для движения робота вперед:
// Назначение пинов int enA = 9; int in1 = 2; int in2 = 3; int enB = 10; int in3 = 4; int in4 = 5; void setup() { // Установка пинов в режим выхода pinMode(enA, OUTPUT); pinMode(enB, OUTPUT); pinMode(in1, OUTPUT); pinMode(in2, OUTPUT); pinMode(in3, OUTPUT); pinMode(in4, OUTPUT); } void loop() { // Движение вперед digitalWrite(in1, HIGH); digitalWrite(in2, LOW); digitalWrite(in3, HIGH); digitalWrite(in4, LOW); // Установка скорости analogWrite(enA, 200); analogWrite(enB, 200); delay(2000); // Двигаемся 2 секунды // Остановка digitalWrite(in1, LOW); digitalWrite(in2, LOW); digitalWrite(in3, LOW); digitalWrite(in4, LOW); delay(1000); // Ждем 1 секунду }
Этот код заставит робота двигаться вперед 2 секунды, затем остановиться на 1 секунду, и так циклически. Для более сложного поведения можно добавить функции поворота, движения назад и т.д.

Добавление датчиков к роботу на Arduino
Чтобы сделать робота «умнее», можно добавить различные датчики. Одним из самых популярных является ультразвуковой дальномер HC-SR04. Он позволяет роботу определять расстояние до препятствий. Подключение HC-SR04 к Arduino:
- VCC датчика подключите к 5V Arduino
- GND — к GND Arduino
- Trig — к цифровому пину (например, 12)
- Echo — к другому цифровому пину (например, 13)
Вот пример кода для измерения расстояния с помощью HC-SR04:
const int trigPin = 12; const int echoPin = 13; long duration; int distance; void setup() { pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); Serial.begin(9600); } void loop() { // Очистка trigPin digitalWrite(trigPin, LOW); delayMicroseconds(2); // Установка trigPin в HIGH на 10 микросекунд digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); // Чтение echoPin, возвращает время прохождения звуковой волны в микросекундах duration = pulseIn(echoPin, HIGH); // Расчет расстояния distance = duration * 0.034 / 2; // Вывод расстояния на монитор порта Serial.print("Distance: "); Serial.println(distance); delay(1000); }
Этот код позволит роботу измерять расстояние до объектов перед ним. Используя эти данные, можно запрограммировать робота объезжать препятствия.

Настройка и тестирование робота на Arduino
После сборки и программирования робота необходимо провести его настройку и тестирование. Вот несколько ключевых шагов:
- Проверьте все соединения. Убедитесь, что все провода подключены правильно и надежно.
- Загрузите программу в Arduino. Подключите плату к компьютеру и загрузите написанный код.
- Протестируйте движение. Запустите робота на ровной поверхности и проверьте, двигается ли он прямо. При необходимости отрегулируйте скорость моторов в коде.
- Проверьте работу датчиков. Если вы добавили датчики, убедитесь, что они корректно определяют препятствия.
- Оптимизируйте код. На основе тестов внесите необходимые изменения в программу для улучшения работы робота.
Помните, что создание робота — это итеративный процесс. Не расстраивайтесь, если что-то работает не идеально с первого раза. Экспериментируйте, вносите изменения и улучшайте своего робота шаг за шагом.
Возможные проблемы при сборке робота на Arduino и их решения
При создании робота на Arduino новички часто сталкиваются с некоторыми проблемами. Рассмотрим наиболее распространенные из них и способы их решения:

- Робот не двигается
- Проверьте подключение батарей и убедитесь, что они заряжены
- Проверьте правильность подключения моторов к драйверу
- Убедитесь, что в коде правильно указаны номера пинов
- Робот двигается рывками или неравномерно
- Проверьте качество соединений всех проводов
- Убедитесь, что колеса свободно вращаются
- Попробуйте изменить значения ШИМ (PWM) в коде для регулировки скорости
- Датчик расстояния работает некорректно
- Проверьте правильность подключения датчика
- Убедитесь, что в коде правильно указаны пины Trig и Echo
- Попробуйте увеличить задержку между измерениями
- Arduino не загружает скетч
- Проверьте, правильно ли выбрана плата и порт в Arduino IDE
- Убедитесь, что USB-кабель исправен и надежно подключен
- Попробуйте перезагрузить компьютер и Arduino
Помните, что большинство проблем при создании робота на Arduino можно решить путем тщательной проверки соединений и кода. Не бойтесь экспериментировать и вносить изменения — это ключ к успешному созданию робота!
Дальнейшее развитие проекта робота на Arduino
После успешной сборки базовой версии робота на Arduino открываются широкие возможности для его усовершенствования. Вот несколько идей для дальнейшего развития проекта:
- Добавление новых датчиков
- Инфракрасные датчики для следования по линии
- Гироскоп для определения положения робота в пространстве
- Датчик освещенности для реакции на изменения света
- Улучшение системы управления
- Добавление Bluetooth-модуля для управления со смартфона
- Реализация Wi-Fi управления через ESP8266
- Создание веб-интерфейса для удаленного контроля
- Расширение функциональности
- Добавление манипулятора или захвата
- Установка камеры для передачи видео
- Интеграция системы распознавания объектов
- Оптимизация энергопотребления
- Использование более эффективных двигателей
- Добавление солнечной панели для подзарядки
- Реализация режима сна для экономии энергии
- Улучшение программного обеспечения
- Реализация алгоритмов машинного обучения
- Создание системы навигации и построения карты
- Разработка графического интерфейса для настройки робота
Развитие проекта робота на Arduino ограничено только вашим воображением. Экспериментируйте, пробуйте новые идеи и не бойтесь ошибок — каждая из них приближает вас к созданию уникального и функционального робота!

Боевые роботы своими руками — через интернет? Почему нет…:-)
Эта история началась почти год назад. Сидели мы как то с другом и подумали, «а что если сделать систему, для игры через интернет? То бишь, управления реальными роботами?»
Сказано – сделано… «робота» 🙂 закипела…
В процессе предварительного обсуждения была выбрана конструкция «а-ля танк»- то есть 2 колеса с отдельными двигателями, без рулевой системы вообще. Эта система дает роботу высокую маневренность и возможность развернуться на 180 градусов, стоя на месте. Кроме того, побочным следствие такого разворота –является возможность наносить удар по шайбе(если есть клюшка) – на этом месте, многие должны вспомнить игру «настольный хоккей»- где хоккеисты вращаются вокруг своей оси и таким образом – бьют по шайбе.
Однако, такое устройство ходовой части – вызвало большие проблемы в будущем. Почему: 2 отдельных двигателя никогда не будут вращаться с синхронной скоростью, если не имеют жесткой механической связи. Почему: разность изготовления на заводе, погрешности в посадке и диаметрах колес и т.д. и т.п.
Почему: разность изготовления на заводе, погрешности в посадке и диаметрах колес и т.д. и т.п.
Поэтому, единственный путь синхронизировать колеса (если не связывать их некой жесткой связью – типа общей оси) – то использовать программную синхронизацию.
Сначала взяли для этих целей акселерометр/гироскоп. Но это оказалась насколько простая, настолько и не неудачная идея: робот стал «терминатором» — который четко «прёт» вперед и его не может сбить с курса ничто-даже удары других роботов. А это плохо 🙂 Мы здесь не «скайнет» строим – и такие «терминаторы» не нужны. К слову, программная реализация сего действа весьма сложна и сможет разобраться и инсталлировать только программер. Мне повезло-я программер :-))))
Пришлось отказаться. Второй путь – установка «энкодеров»(дырчатых дисков) на колеса и датчиков, считывающих импульсы, когда «дырка» проходит мимо датчика. Таким образом, зная скорости прохождения «дырок» на каждом из колес, — можно много раз в секунду корректировать скорости вращения колес и делать их одинаковой. Это не делает робота «терминатором» — его вполне можно сбить с курса, ударом другого робота. Это просто синхронизирует скорости колес. То, что надо.
Это не делает робота «терминатором» — его вполне можно сбить с курса, ударом другого робота. Это просто синхронизирует скорости колес. То, что надо.
Сразу скажу, что это был весьма тернистый путь — как с точки зрения использующихся технических решений, так и физической сложности изготовления: одних только деталей для роботов — было отпечатано более 100 штук! Причем печать велась на открытом балконе,
Достаточно сказать, что одна только управляющая программа для заливки в роботов – представляет собой 15 вкладок в Arduino IDE до 300 с лишним строк каждая О_о
Были на этом пути и неудачи: была закуплена большая партия Ni-Mh аккумуляторов и зарядных устройств, для них. Но, как оказалось, они не справляются с такой энергоотдачей.
И, в итоге- они полетели в корзину(условно)…:-(
Пришлось перейти на литий-ионные элементы 18650.
Сейчас система представляет собой веб сайт, на который ведется трансляция с youtube. «Пилоты» роботов заходят на него и берут в управление свободного робота. И «let the battle-begin!!!» 🙂
И «let the battle-begin!!!» 🙂
Управление ведется «стрелками» с клавиатуры. Также, оно дублировано на другую конкурирующую схему (лично я- «фу фу, только стрелки» 🙂 — но пускай будет) – WASD.
Для создания стола – мы закупили школьную доску.
И установили на нее бортик из алюминиевой полосы. Это работа была бы невозможной, без станочного парка. Тут нам тоже повезло-у нас есть токарный станок по металлу и сверлильный тоже..
Далее-дома валялась пару прутов из нержавеющей стали. Отпилили нужные куски из нее, выточили на концах оси под подшипники и установили их – как оси для ворот (ворота задумали как откидные, для того, чтобы доставать оттуда шайбы было проще).
Далее — напечатали боковины ворот с плотной посадкой подшипников в них (подшипники завалялись у меня в количестве аж 50 штук от другого проекта).
На боковинах можно видеть гребенки – натяжители сетки. Которые помогут нам натянуть сетку на ворота.
Далее – из того же нержавеющего прута и куска такой же нержавеющей трубы(ибо прут закончился нежданно-негаданно 🙂 ) – были выточены соединительные распорки для боковин.
В качестве сетки – случайно попался на глаза и был немедленно разодран :-)))))) — сетчатый мешок для стирки мелких вещей в стиральной машине. У него оказался весьма модный шестигранный рисунок сетки. Мы впали в восторг! :-)))
Однако, — рано радовались. Как оказалось, начался самый сложный этап для почти любого мужика- швейные работы! :-)))))) Как оказалось, это даже сложнее, чем программинг, 3d печать и токарные работы –вместе взятые! :-)))))))))
Вдоволь намучавшись – мы таки обшили сеткой ворота. Система — готова! Уииии!!! :-)))
В качестве шайбы – было взято решение, которое я подсмотрел давным давно-еще в начале 90-х, в журнале «Юный Техник».
Тогда я был моложе, трава зеленее — а руки у меня «кривее» :-)
Они предлагали ее сделать из шайб для хоккея и больших шаров от подшипников. Это позволило бы играть в хоккей в крытом помещении на обычном полу.
Тогда -у меня ничего не вышло. Но, спустя примерно 30 лет, с помощью не своих рук, а 3d принтера-я таки осуществил сие! ^_^
Таки што я имею сказать по этому поводу: скользит просто как по льду.
Ну, что еще могу сказать по поводу? Да только «Blades of Steel» / Клюшки из стали :-))))
Видео первых тестов: 😉
Как собрать робота своими руками
Собрать собственного робота — это мечта чуть ли не каждого мальчишки. Можно вспомнить и повальное увлечение роботами в Советском Союзе, особенно в 70-80 годах, и попытки создать крутых терминаторов после одноимённого фильма, и даже целые турниры, где роботы сражались за первенство, уничтожая друг друга на арене. В общем, роботы увлекали людей со дня сборки первой модели.
И если раньше для создания робота требовались большие деньги, много времени и сил, то теперь их сборка представляет собой конструктор. Ты устанавливаешь детали на платформу, заливаешь код на плату (готовый или самописный — зависит от твоих навыков в программировании и того, что ты ждёшь от робота), и вот, готовый терминатор, который будет служить тебе верой и правдой.
Звучит несложно. Но это только на словах. На деле же для сборки робота, а не радиоуправляемой игрушки, умеющей ездить только вперёд и назад, нужно много разных деталей. В этой статье мы расскажем тебе о том, как собрать простого робота из недорогих деталей.
База
Базой любого робота является его подвижная часть. База может быть колёсной или гусеничной, но мы рекомендуем именно гусеничную. Такая база имеет лучшую проходимость, нежели колёсная, может поворачиваться на месте, а также более устойчива на неровной поверхности. Некоторые при сборке робота на гусеничной базе покупают игрушечный танк, разбирают и оставляют только базу, на которую крепят плату и другие детали. Это вариант неплохой, но затратный. Проще и дешевле купить гусеничную базу. Пример такой базы — пластина для Rover. Ссылка на неё ниже. Плюс этой базы в том, что на ней закреплено пластиковое основание, которое позволяет легко закрепить плату микроконтроллера Arduino, драйвер двигателей, элементы питания и датчики. Это делает возможным быстро собрать робота без необходимости разметки и сверления.
Это делает возможным быстро собрать робота без необходимости разметки и сверления.
Купить гусеничную базу →
Платы
Часто в качестве основной платы выбирают «Arduino». Они простые в монтаже, достаточно мощные и надёжные. Но железо не ограничивается только одной платой, и для функционирования робота требуются драйверы двигателя, микросхемы, транзисторы — в общем, много сложных деталей.
Для твоего первого робота мы рекомендуем набор «Ардуино ДВ», ссылка на который будет ниже. В этом наборе очень много деталей, которые позволяют создать робота, не задумываясь о том, что тебе ещё нужно докупить для его нормального функционирования. В комплекте идет плата «Ардуино» UNO R3, макетная плата МВ-102, реле, датчики наклона, огня, температуры, влажности и уровня воды, шаговый двигатель, драйвер шагового двигателя, резисторы от 220 Ом до 10 кОм, светодиоды, тактовые кнопки, зуммеры, фоторезисторы, индикаторы, серводвигатель, ИК-приёмник, ИК-пульт, джойстик, LED матрица, LCD экран и другие детали.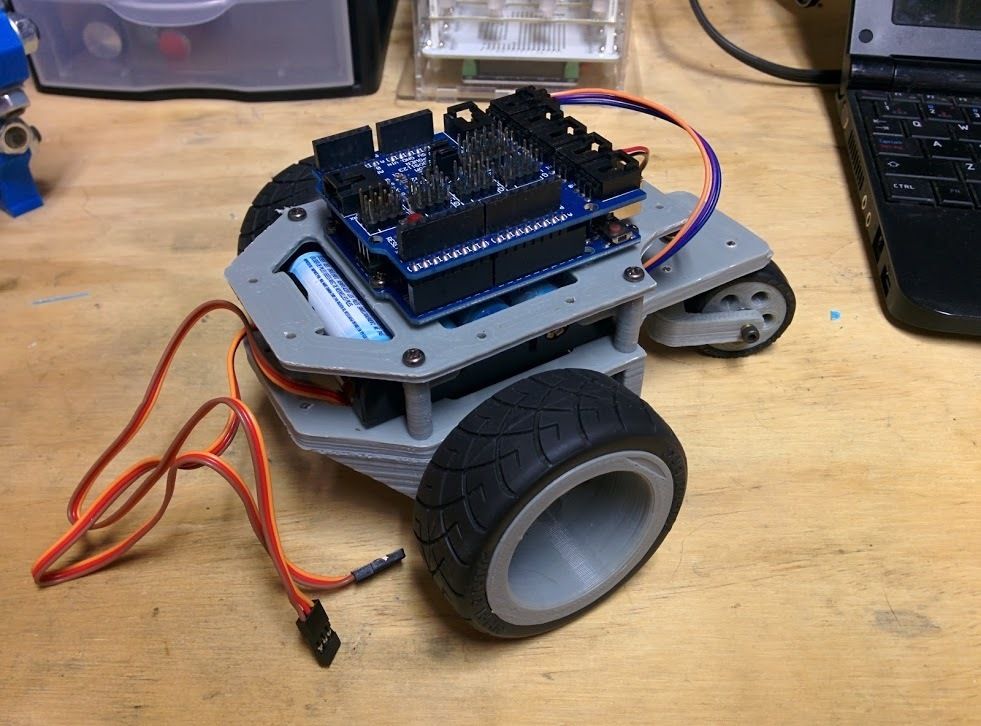 В наборе доступно 33 урока по сборке робота.
В наборе доступно 33 урока по сборке робота.
Кстати, покупать такие наборы удобнее, чем заказывать отдельные детали. Во-первых, в комплекте есть всё необходимое. Во-вторых, цена на 40% ниже, чем если бы ты покупал детали по отдельности. И в-третьих, проверенные детали. К комплекту «Ардуино ДВ» можно докупить дополнительные модули и датчики, сделав робота более функциональным. Лучший выбор для новичка.
Купить комплект Ардуино ДВ →
Дополнительные датчики
Чтобы твой робот не бился об стены и другие преграды, его нужно оснастить датчиками препятствия. Существуют датчики столкновений, датчики линий, инфракрасные датчики, ультразвуковые дальномеры и другие датчики. Также, чтобы сделать робота умным, можно оснастить его датчиками движения и освещения, которые позволят ему ориентироваться на местности, объезжая не только статичные, но и динамичные объекты. Рекомендуем устанавливать минимум два датчика препятствий на передней части робота. Желательно установить ещё два датчика и в задней части. Помни: чем больше датчиков, тем лучше.
Помни: чем больше датчиков, тем лучше.
Купить датчики →
Питание
От качества системы питания будет зависеть продолжительность функционирования робота на одном заряде. Основной деталью является блок питания. Рекомендуем выбирать блок питания с входным и выходным фильтром от электромагнитных помех, защитой от превышения выходного напряжения, потребляемого тока и короткого замыкания на выходе. Это защитит робота даже при скачках напряжения.
Далее от блока питания ток поступает на платы и батареи. Для того чтобы робот был автономным, необходимо установить блок для батареек. Блоки бывают как компактными, для небольших круглых батареек, так и массивными, в которые устанавливается 10 батареек АА. Помни, что чем больше блок для батареек, тем больше вес робота. Если ты собираешь компактного робота, то лучше выбрать блок на 2 батарейки.
Также вместо батареек ты можешь установить блок питания, защищённый от воздействия влаги и солнечного света. Блок питания подойдёт в случае, если ты собираешься управлять роботом на улице.
Купить элементы питания →
Перечисленные выше детали для сборки робота мы нашли в интернет-магазине «ДВ Робот». Также в магазине есть радиодетали, провода, кабели, разъёмы и комплектующие. Кроме того, в разделе «Майнинг» ты найдёшь всё необходимое для майнинга криптовалют. В разделе «Базар» ты можешь бесплатно разместить объявление для продажи товаров и услуг или найти вещи по невысокой цене. В разделе «Новинки» ты обнаружишь много интересных товаров: например, 3D-принтеры, карбон и кевлар, а также платы и инструменты.
Посмотреть новинки интернет-магазина «ДВ Робот» →
Другие статьи по темам:
роботы
Статьи – RoboCraft
Статьи – RoboCraftМагазин
Arduino — это открытая аппаратная платформа, основными компонентам которой являются небольшая плата ввода/вывода (контроллер) и простая среда разработки на языке программирования С++ (упрощённая версия - Wiring). Обе части системы Arduino очень просты в использовании, но при этом обладают замечательной гибкостью.Эти важные свойства - открытость, простота, гибкость - и принесли Arduino заслуженную популярность среди любителей сделать что-нибудь своими руками. Arduino позволяет пытливым умам школьников, студентов, программистов, дизайнеров, гиков и других креативных товарищей, собрать своё собственное устройство/гаджет/робота, которое сможет работать автономно, либо в связке с компьютером.
Купить Arduino
Купить Arduino Uno или CraftDuino - в нашем Магазине.Введение
Arduino - введение Ардуино что это и зачем Что за язык программирования используется для Arduino? ХоумМейд Arduino - как сделать Arduino своими руками Arduino как фреймворк КМБ для начинающих ардуинщиков Состав стартера (точка входа для начинающих ардуинщиков) Как адаптировать библиотеки для Arduino 1.0 Разновидности плат Arduino, а также про клоны, оригиналы и совместимость Возможные ошибки при работе с Arduino Программирование Arduino при помощи Raspberry PiОсновы программирования Arduino/CraftDuino
1.Программирование Arduino - введение 2. Структура программы, константы 3. Цифровой ввод/вывод 4. Аналоговый ввод/вывод 5. Дополнительные функции ввода/вывода 6. Работа со временем 7. Математические функции 8. Псевдослучайные числа 9. Последовательная передача данных 10. Прерывания 11. EEPROM 12. Cоздание своей библиотеки Blink без delay
Практическая работа и программирование Arduino/CraftDuino
Подготовка к работе с Arduino/CraftDuino Ошибки Arduino 0. Начало 1. Цифровой ввод - кнопка 2. Аналоговый вывод - Fading 3. Аналоговый ввод – потенциометр 4. Аналоговый ввод – осциллограф 5. Генерация звука – пьезоизлучатель. 6. Фоторезистор 7. Сенсор на светодиоде 8. Общение с Arduino - программирование работы с COM-портом. 9. Аналоговый датчик температуры – LM335 10. Подключаем к Arduino мышку PS/2 Протокол 1-Wire и iButton (Arduino и эмулятор iButton) Arduino и температурный 1-Wire датчик DS18S20 Arduino и драйвер двигателей L293D (Простой мотор-шилд) Сборка мощного моторшилда (на базе L298) Arduino и сервомашинка Как с помощью Arduino/CraftDuino можно управлять устройствами на 220В Подключаем LCD-дисплей на базе HD44780 к Arduino (Графический экран WG12864B (и ему подобные на ks0107/ks0108)) ИК-датчик препятствий для Arduino на базе фототранзистора Датчик измерения расстояния SHARP-GP2Y0A02YK0F Ультразвуковой датчик измерения расстояния HC-SR04Библиотеки Arduino
Ethernet library – библиотека для работы с Ethernet Servo library – библиотека для работы с сервомашинками Firmata library – библиотека, реализующая протокол Firmata OneWireSlave - библиотека эмуляции устройства 1-Wire TimerOne - библиотека для работы с таймером МК Wire - библиотека для работы с I2C GLCD - библиотека для работы с графическими LCD Дополнительно Arduino/CraftDuino и PROTEUS Arduino/CraftDuino и WinAVR - программируем на чистом СSPI и Arduino
теория, вывод, ввод Подключаем кучу устройств к Arduino по 5 проводам Делаем ISP-программатор из Arduino Каскад входных сдвиговых регистров Bluetooth-модуль HC-05 Энкодер и шкала Датчики Холла TC15-11 - матрица сетодиодная 8х8 CraftDuino и RFID-модуль RC522Сервомашинки и Arduino
Сервомашинки Сервомашинки 2.Взгляд под корпус (SG-5010) Подключение сервомашинок к Arduino Хаки сервомашинок. Переделка в серву постоянного вращения
CraftDuino
Описание CraftDuino v2.0 Описание CraftDuino v2.0 SMD Описание CraftDuino v1.0 и её отличий от ArduinoArduino и ...
Arduino и Processing Arduino и Matlab Arduino и LabVIEW Arduino и Scratch (S4A) Arduino и openFrameworksРоботы на Arduino
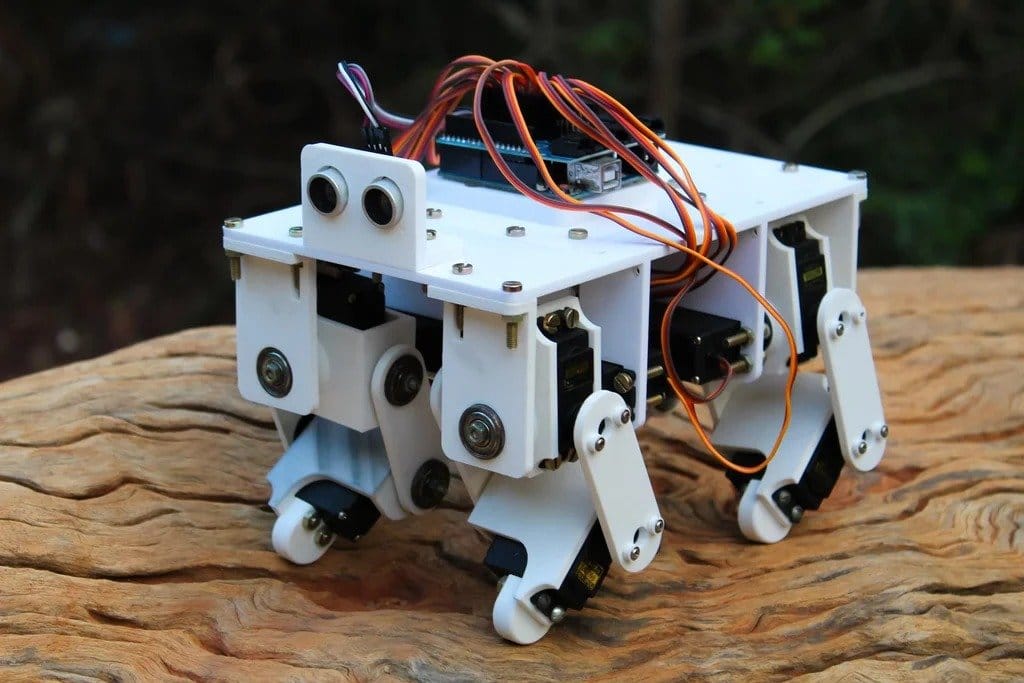
Самодельный робот-пылесос на базе Arduino (Картонный робот-пылесос) Коллективные виброботы на Arduino Простой шагающий робот на Arduino Двуногий робот на Arduino Четырёхногий шагающий робот на Arduino Управление роботом-пылесосом iRobot Roomba с помощью Arduino Роборыба на базе Arduino (с использованием 3D-печати) Обучаемый манипулятор на базе Arduino Манипулятор-клешня из ПКЛ ArduRoller - балансирующий робот на Arduino Гусеницеподобный робот на Arduino Nano Забавный робот на 3 сервах Радиоуправляемый робот и многие-многие другие Arduino роботы...Дополнительные материалы
Шпаргалка по Arduino Книги про Arduino Выводы Arduino и Arduino pin mapping Блок питания Arduino из зарядки сотового телефона Программаторы Прошивка бутлоадера Программирование Arduino - Физика процесса.Про фьюзы Хаки Arduino - Экономим RAM ATmega - использование памяти Fritzing - САПР для Arduino. VirtualBreadboard - эмулятор Arduino Игра "Жизнь" на Arduino Самодельный датчик цвета
Интерфейсы
1-Wire SPI Интерфейс I2CArduino логотипы
Разное
Управляемая веб-камера Мозги для робота Новогоднее исследование ADSL-роутера на базе Linux - введение Робософт - обзор существующих решений Управление роботом-пылесосом iRobot Roomba с помощью Arduino Исследование Wi-Fi-роутера TP-LINK TL-MR3020Нейронная сеть
Нейронная сеть - введение Обучение ИНС с помощью алгоритма обратного распространения Пример работы самоорганизующейся инкрементной нейронной сети SOINNПолезные ресурсы
arduino.cc roboforum.ru instructables.com letsmakerobots.com easyelectronics.ru
Узнайте, как собрать собственного робота Arduino
Шаг №1: Соберите детали платформы
NextPrev
Откройте пакет деталей для мобильной платформы. Вы заметите, что в комплекте нет инструкций, поэтому я помогу вам пройти через процесс сборки.
Шаг № 2. Разделите винты
NextPrev
- Откройте небольшой пластиковый пакет, выньте все металлические винты и отделите одинаковые винты.
- Также разделите шайбы и гайки. Изолируя все, это помогает вам выяснить, где они в конечном итоге используются.
Шаг №3: Установка моторов
NextPrev
- Найдите две узкие металлические детали и соберите моторы. На двигателе есть маленькое желтое отверстие и отверстие для оси.
- Возьмите один из длинных винтов и вставьте его с внешней стороны металла в отверстия на двигателе. Меньшие шайбы и меньшие гайки подходят к более длинным винтам.
- Сделайте это для каждого двигателя.
- У вас, вероятно, будут лишние винты или детали в проекте, так что не беспокойтесь, если найдете лишние.
Шаг № 4: Подключение двигателя
NextPrev
- Найдите длинную жилу провода в своем тайнике с деталями. Отрежьте пять одинаковых прядей этой проволоки и зачистите концы с каждой стороны.
- Четыре провода будут использоваться для четырех двигателей, а пятый будет использоваться для выключателя.
- Подсоедините два провода соединительного провода к каждому из проводов на двигателе. Возьмите паяльник и припаяйте провода к выводам на двигателе. Сделайте это для каждого двигателя.
- Зайдите в свои Minitronics: Survival Packs и возьмите конденсатор 0,1 мкФ из каждого. Они помечены цифрой 104. После некоторых исследований я обнаружил, что конденсатор 0,1 мкФ, припаянный к каждому проводу на двигателе, гарантирует, что они не будут перемещаться со случайными интервалами. Итак, просто вставьте конденсатор в каждый вывод двигателя, как показано на рисунке.
- Соблюдайте осторожность при пайке двигателей. Выводы на двигателе хрупкие, поэтому просто будьте осторожны при пайке проводов.
Шаг № 5: Подключите тумблер
NextPrev
- Подсоедините оставшийся кусок соединительного провода к двум последовательным выводам тумблера.

- Теперь найдите половину шестигранной металлической детали с двумя отверстиями посередине. Снимите гайку и шайбу и поместите тумблер через отверстие. Замените гайку и шайбу.
Шаг № 6: Привинчивание основной рамы
NextPrev
- Теперь соберите восемь меньших винтов и соберите восьмиугольные металлические детали. Детали должны точно подходить друг к другу, а отверстия по краям должны совпадать, чтобы в них входили винты.
- Инертизируйте винты с каждой стороны, а затем вставляйте винты по всему периметру, пока не получите прямоугольную основную раму для вашей платформы.
Шаг № 7. Прикрепите нижнюю крышку
NextPrev
- Найдите прямоугольную крышку с шестью отверстиями и четырьмя по краям.
- Поместите его на одну сторону основной рамы и вкрутите четыре винта в совпадающие отверстия. Примечание: два оставшихся отверстия будут использоваться для держателя батареи.
Шаг #8: Установка держателя батареи
NextPrev
- Держатель батареи должен быть размещен внутри основной рамы так, чтобы два провода держателя батареи были обращены к двум проводам тумблера.

- Вставьте два винта с плоской головкой из оригинальной упаковки винтов. Протолкните их через отверстия в держателе батареи, а затем поместите гайку и шайбу на другой конец.
- Не затягивайте их слишком туго, чтобы не повредить пластиковый держатель батареи.
Шаг № 9: Подключение выключателя питания к держателю батареи
NextPrev
- Подсоедините красный провод от держателя батареи к среднему проводу тумблера. Зачистите черный провод (если он еще не зачищен) и пока оставьте его. То же самое касается и оставшегося провода на тумблере.
- Я рекомендую скрутить провода вместе, припаять их, а затем обмотать соединения изолентой.
- Тогда просто спрячьте провода внутри рамы.
Шаг №10: Добавьте батареи в держатель
NextPrev
Так как крышка будет надеваться на основную раму, вам нужно вставить батареи, прежде чем мы прикрутим крышку. Вам понадобится пять батареек типа АА.
Шаг 11. Добавьте верхнюю крышку
NextPrev
- Найдите верхнюю крышку и поместите сторону с 4 отверстиями напротив тумблера.
 Это будет передняя часть робота.
Это будет передняя часть робота. - Протяните провода через прорези на обоих концах крышки. Я обозначил одну сторону двигателей изолентой, так как это поможет нам, когда мы будем подключать двигатели.
- Найдите 4 винта того же типа, которые мы использовали. Вставьте четыре винта в 4 отверстия, которые, как вы видите, открыты. Обратитесь к изображению, если вам нужно знать, куда именно его вкрутить.
Шаг 12: Припаяйте моторный щит
NextPrev
- Теперь, когда основное шасси робота построено, мы можем приступить к некоторым из электрики! Плата Arduino Motor Shield упрощает управление двигателями и их питание.
- Найдите комплект и компоненты Motor Shield, и приступим!
Шаг №13: Резисторы
NextPrev
Вставьте коричнево-зелено-красный резистор в R1, а коричнево-черно-оранжевый в R2.
Шаг 14. Желтые конденсаторы
NextPrev
- Вставьте желтые керамические конденсаторы в C4, C2 и C6.
 Затем припаяйте их.
Затем припаяйте их. - (у меня было размытое изображение для этого шага, поэтому я также использую изображение из следующего шага в этом шаге). Следующие два компонента будут описаны в следующем шаге.
Шаг № 15: Кнопка сброса и сеть резисторов.
NextPrev
Кнопка сброса находится внизу слева. Сеть резисторов вставляется там, где написано RN1. Убедитесь, что конец с точкой входит в отверстие, отмеченное знаком X.
Шаг 16: микросхемы
NextPrev
Имеется две микросхемы L293D. Вставьте их в IC1 и IC2. Затем вставьте другую ИС, 74HC595, в IC3. Убедитесь, что буква U на микросхеме совпадает с буквой U на печатной плате.
Шаг №17: Конденсаторы 47 мкФ
NextPrev
В комплект входят два черных конденсатора по 47 мкФ. Они будут вставлены в C7 и C8. Убедитесь, что вы вставляете их с правильной полярностью. Отрицательная сторона отмечена серой полосой, поэтому вставьте ее в отверстие, не отмеченное положительной стороной на печатной плате.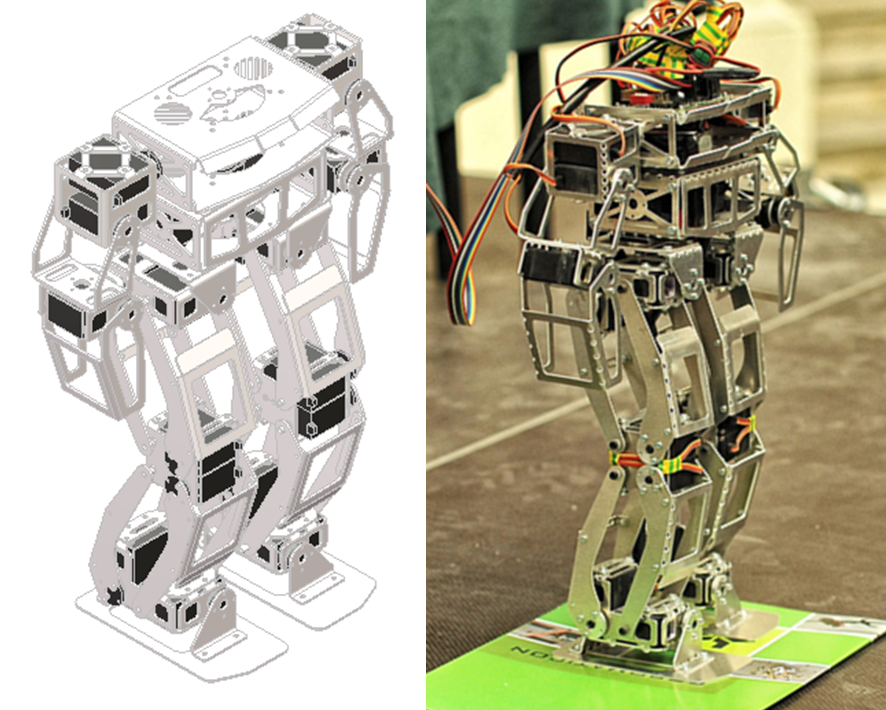
Шаг 18: Конденсаторы 100 мкФ
NextPrev
- В комплект входят три конденсатора 100 мкФ. Как и в случае с другими конденсаторами, обратите внимание на полярность при их установке. В моем комплекте было только два конденсатора по 100 мкФ, но в моем Minitronics: Survival Pack был конденсатор на 100 мкФ. У него было более высокое номинальное напряжение, чем у других, но это нормально. Впаяйте их.
- Пока вы это делаете, вставьте светодиод в его место, обозначенное как LED1. Более длинный вывод является положительным, поэтому обратите внимание на это, когда будете вставлять его в печатную плату. Впаяйте его.
Шаг 19: Обрежьте разъемы
NextPrev
- В комплект входит 36-контактный разъем. Разрежьте заголовок на два 8-контактных разъема, два 6-контактных разъема, два 3-контактных разъема и один 2-контактный разъем.
- Два 3-контактных разъема будут вставлены в верхнюю левую часть печатной платы. Более короткая сторона вставляется в доску, поэтому держите более длинные выводы вверху.
- 2-контактный разъем будет вставлен в отверстия с надписью PWR. Как и прежде, более короткой стороной внутрь, более длинной стороной наружу. Сохраните 6-контактный и 8-контактный разъемы для последующего шага.
Шаг 20. Клеммные колодки
NextPrev
- Имеется три 2-контактных блока и два 3-контактных блока. Один из двухконтактных блоков вставляется в пространство EXT_PWR.
- На каждой стороне печатной платы есть клеммы с 5 точками. Итак, с каждой стороны просто объедините 2-клеммную колодку и 3-клеммную колодку. Припаяйте их квадратными отверстиями наружу. Сюда подключаются провода.
- Игнорировать припаянные контакты (заголовки) на Msheild v1.1. Это можно сделать в последнюю очередь, после подключения ардуино и шилда. Хотя, если вы предпочитаете, вы можете сделать это сейчас.
Шаг № 21:
NextPrev
- Оставшиеся разъемы
- Теперь возьмите оставшиеся разъемы и поместите их в Arduino маленькими концами вверх.
- Теперь поместите Motor Shield на разъемы, подключенные к Arduino, и проденьте короткие провода через отверстия в экране.
- Теперь припаяйте соединения. Как только они спаяны, вы готовы к работе. Моторный щит можно снять или оставить на данный момент.
- Если вы используете uno, обратите внимание, что некоторые контакты (заголовки) не размещены в arduino, это важно.
Шаг 22: Установка программного обеспечения Arduino
NextPrev
Установите программное обеспечение Arduino, если вы этого еще не сделали. Ознакомьтесь с учебным пособием Make: How-To, которое поможет вам настроить Arduino.
Шаг 23. Подключите питание двигателя к Motor Shield
NextPrev
- Найдите оставшийся провод от тумблера и черный провод от держателя батареи.
- Открутите винты на клеммной колодке с 2 клеммами. Теперь возьмите черный провод и вставьте его в клемму GND. Возьмите провод от тумблера и вставьте его в клемму М+.
- Затяните винты терминала, и ваш Arduino должен получить питание.
 Нажмите на переключатель, чтобы убедиться, что он включен.
Нажмите на переключатель, чтобы убедиться, что он включен.
Шаг 24. Подключение двигателей к защитному экрану
NextPrev
- Возьмите провода, идущие от ваших двигателей, и вставьте каждый набор проводов в две внешние клеммы (в ряду по 5).
- Полярность в данном случае не имеет значения. Когда вы запустите двигатели, если вы обнаружите, что колесо на двигателе должно вращаться в противоположном направлении, просто переключите провода, которые вы вставили в клемму.
- Хорошо; мы достигли контрольной точки № 1, и теперь мы можем проверить, работают ли ваши двигатели и Arduino. Мы проверим их на следующем шаге.
Шаг № 25. Проверка двигателей и MotorShield
NextPrev
- Начните с нажатия тумблера. Если загорается зеленый свет, это означает, что на Motor Shield подается питание, а значит, и на ваши моторы!
- Теперь мы можем приступить к тестированию Motor Shield. Предполагая, что на вашем компьютере установлена программа Arduino, мы можем двигаться дальше.

- Подключите Arduino к компьютеру и загрузите скетч Motor_Test.pdf, найденный в начале проекта. Это просто простой цикл, чтобы убедиться, что ваши двигатели работают.
- Убедитесь, что Arduino не касается металлической поверхности корпуса. Сначала я этого не осознавал, поэтому мои моторы просто беспорядочно дергались! Поэтому поместите кусок картона под Arduino, чтобы убедиться, что ничего не закорочено. Вы можете покрасить картон в черный цвет, чтобы он соответствовал цвету шасси.
Шаг 26. Добавьте стойки верхнего уровня
NextPrev
- Вкрутите длинные стойки бронзового цвета в отверстия для винтов, расположенные между парами винтов на шасси.
- Затем можно добавить верхний уровень кадра. Его можно использовать для датчика Ping или других аксессуаров по вашему выбору. Импровизация зависит от вас.
Шаг 27: Установка передней каретки
NextPrev
- Оставшаяся металлическая деталь, которая еще не установлена, — это деталь с множеством узких прорезей.

- На конце, противоположном тумблеру, есть два дополнительных отверстия, куда можно прикрутить переднюю каретку.
- Я поставлю Arduino здесь, но это ваш выбор.
Шаг № 28: Установите крепления датчика
NextPrev
- В пакете с винтами есть три странных металлических элемента с отверстием в каждом из них. Я буду использовать два из них, чтобы удерживать датчик Ping на верхнем уровне робота.
- Сначала тщательно обмотайте металл изолентой. Датчик будет находиться довольно близко к металлу, поэтому вам не нужны короткие замыкания.
- Я использовал только один винт для каждой детали, но поскольку отверстий всего 3, он должен быть немного смещен в одну или другую сторону.
- Возможно, будет проще снять верхний уровень, чтобы вкрутить эти детали. Трудно навинтить гайки на винты, когда прикреплена рама верхнего уровня.
Шаг 29. Установка датчика проверки связи (часть 1)
NextPrev
- Вы собираетесь подключить датчик проверки связи к Motor Shield.
 На Мотощите вы увидите 3 ряда по 6 отверстий в каждом. Они помечены как GND, +5 и A0-5.
На Мотощите вы увидите 3 ряда по 6 отверстий в каждом. Они помечены как GND, +5 и A0-5. - Войдите в свой набор для выживания Minitronics и достаньте запасные соединительные провода. Отрежьте три куска (я использовала разные цвета), каждый длиной, которая может пройти от передней каретки до верхнего уровня. Если вы сомневаетесь, просто отрежьте его длиннее, чем вам кажется нужным.
- Зачистите оба конца каждого провода. Теперь возьмите один конец первого провода и вставьте его снизу вверх в одно из отверстий в A0-5. Припаяйте этот провод сверху.
- Отверстия A0-5 идут к аналоговым входам на Arduino, но их также можно использовать как цифровые входы, если это указано в программе (какой именно).
- Возьмите второй кусок провода и вставьте его (снизу вверх) в одно отверстие в ряду GND. Припаяйте его сверху.
- Наконец, возьмите последний кусок проволоки и вставьте его (снизу вверх) в отверстие в ряду 5+. Впаяйте это.
Шаг 30. Установка датчика Ping (часть 2)
NextPrev
- Теперь проденьте три провода через узкую щель в передней части робота.
 Они подключаются к самому датчику PING.
Они подключаются к самому датчику PING. - Припаяйте каждый провод, следя за тем, чтобы заземление экрана было припаяно к заземлению датчика. 5+ на экране подключается к контакту 5+ на датчике, а A0-5 на экране подключается к контакту SIG на датчике.
- Аккуратно оберните соединительный провод вокруг каждого провода датчика и припаяйте их.
Шаг 31: Крепление датчика Ping
NextPrev
- Теперь вы готовы прикрепить датчик Ping к креплениям датчика. Я обмотал крепления датчика изолентой, чтобы датчик Ping лучше держался.
- Убедитесь, что провода или металл датчика не касаются другого металла. Если это так, просто обмотайте виновника небольшим кусочком изоленты.
Шаг 32. Сборка блока питания Arduino
NextPrev
- Найдите держатель батареи 9 В, заглушку держателя батареи и винт, который скрепляет все это вместе.
- Отвинтите пластиковую деталь от вилки и сдвиньте ее по двум проводам к корпусу.
 Он будет прикручен к верхней части вилки после припайки проводов.
Он будет прикручен к верхней части вилки после припайки проводов. - Красный провод от держателя должен быть подключен к более короткому выводу вилки, а черный провод припаян к более длинному выводу.
- Обожмите два провода в фиксаторе, убедившись, что они не замыкаются друг на друга. Затем возьмите пластиковый корпус и наверните его на металлическую заглушку.
- Установите батарею в держатель. Вверните винт, чтобы скрепить корпус, и мы готовы к работе.
Шаг № 33: Программирование
NextPrev
- Я предоставил программу, которую вы можете загрузить на Arduino. Он находится в файле Arduino_Robot_Code.pdf, который находится в разделе «Файлы» на первой странице этого руководства. Эта программа заставляет робота двигаться вперед, пока объект не будет обнаружен. Затем робот движется назад и поворачивает направо. Затем он снова идет вперед, повторяя этот процесс.
- Подключите Arduino к USB-порту вашего компьютера. Штекер батареи 9 В подключается к черному гнездовому разъему на Arduino.
- Скомпилируйте код, а затем загрузите его в Arduino.
- Нажмите переключатель на задней панели вашего робота, нажмите переключатель на источнике питания, и у вас есть робот, избегающий объектов на базе Arduino!
8 роботов Arduino, которые можно собрать менее чем за 125 долларов
Автор Дэнн Олбрайт
Делиться Твитнуть Делиться Делиться Делиться Электронная почта
Arduino может многое, но знаете ли вы, что он может создавать полноценных роботов? Да ещё и совсем дёшево!
Проекты Arduino для начинающих, хотя они и могут быть образовательными, часто не так уж и интересны. Создание светофора полезно для изучения программирования, но как только вы это сделаете, его полезность иссякнет. Таймер Pomodoro на базе Arduino — это здорово, но не так уж захватывающе. Хотите заняться чем-то более увлекательным? Попробуйте построить робота, управляемого Arduino: вот восемь доступных вариантов.
В этот набор входит все необходимое для создания программируемого робота — вам просто нужно добавить Arduino! Это платформа робота на гусеничном ходу, что делает его пригодным для перекатывания по менее чем идеально гладким поверхностям, а также оснащена шестью инфракрасными датчиками, чтобы предотвратить столкновение с вещами. Объедините это с отвалом бульдозера, двигателями, зуммером и еще парой датчиков, чтобы помочь роботу не сбиться с пути, и вы получите отличный проект Arduino для начинающих.
Робот 3pi поставляется с собственным микроконтроллером. И хотя технически это не контроллер Arduino, ATmega328, лежащий в основе устройства, совместим с платформой разработки Arduino, так что вы можете попрактиковаться в программировании Arduino с помощью этого комплекта. Он также включает в себя ЖК-экран, так что ваш робот может отображать сообщения! Со светодиодами, зуммером, датчиками отражения и двумя независимыми двигателями это отличный робот как для начинающих, так и для опытных энтузиастов робототехники.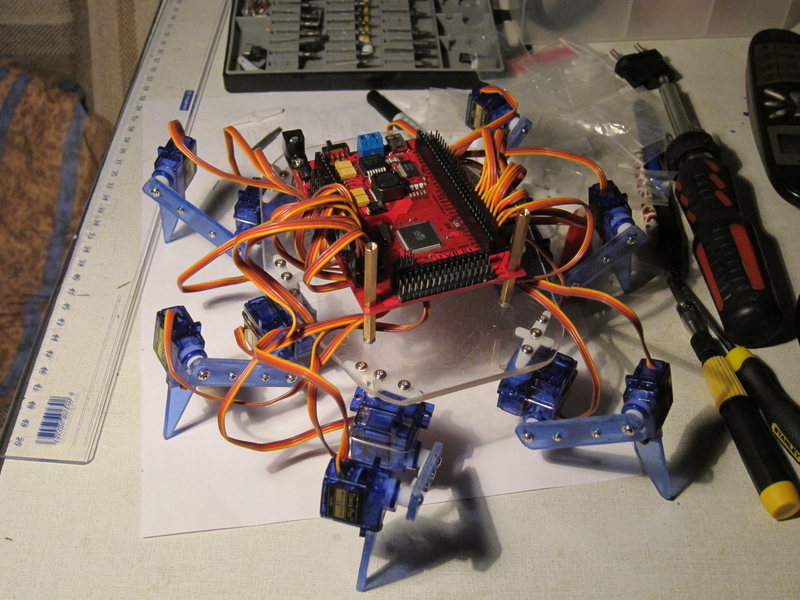
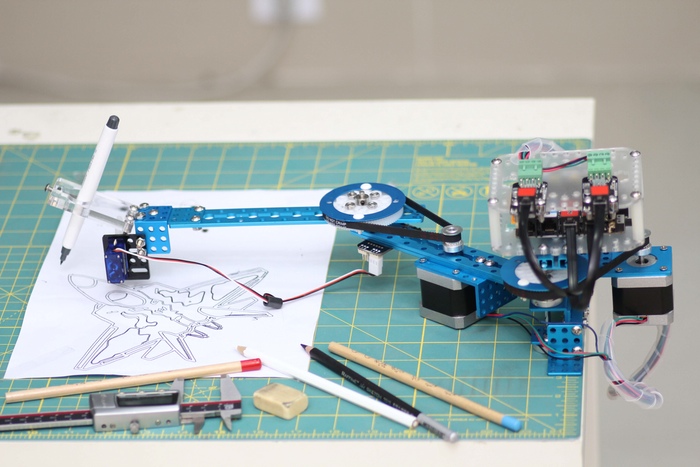
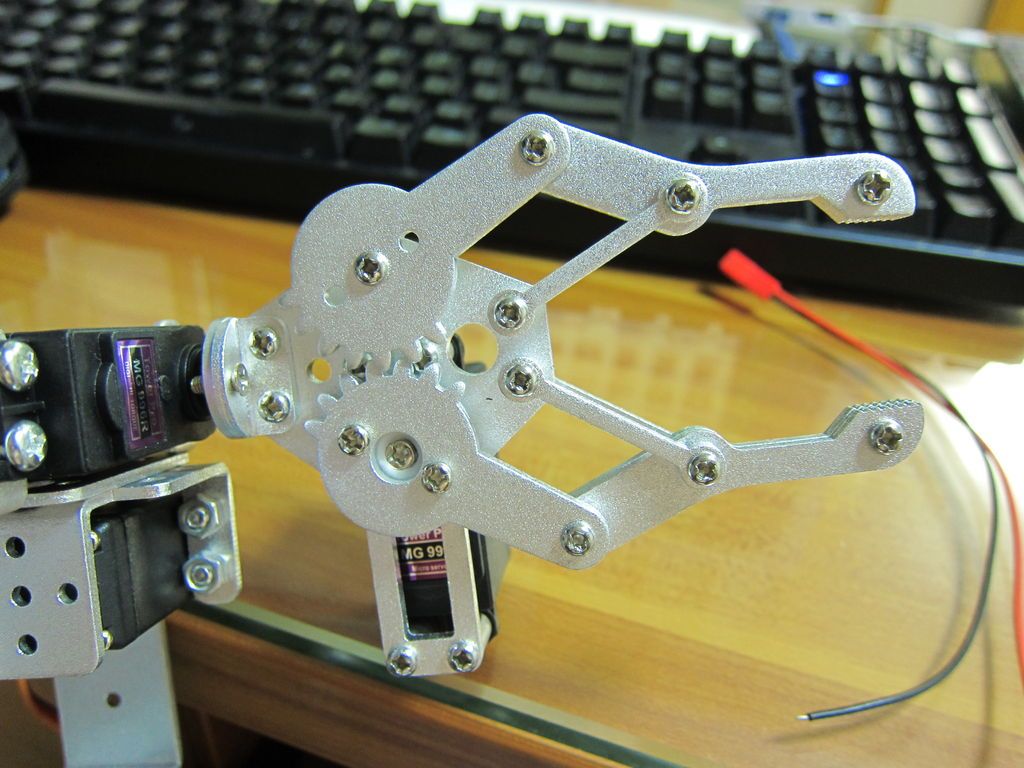
Не все роботы представляют собой крошечные угрозы на колесах — существует множество других вариантов! Эта роботизированная рука имеет полностью акриловую раму и четыре сервопривода; вам просто понадобится небольшая отвертка, чтобы собрать его, и Arduino, чтобы управлять им. Возможно, вам придется поэкспериментировать и поискать в Интернете, чтобы выяснить, как лучше всего запрограммировать его, но вы можете прочитать статью Lifehacker о создании роботизированной руки, чтобы узнать, как начать.
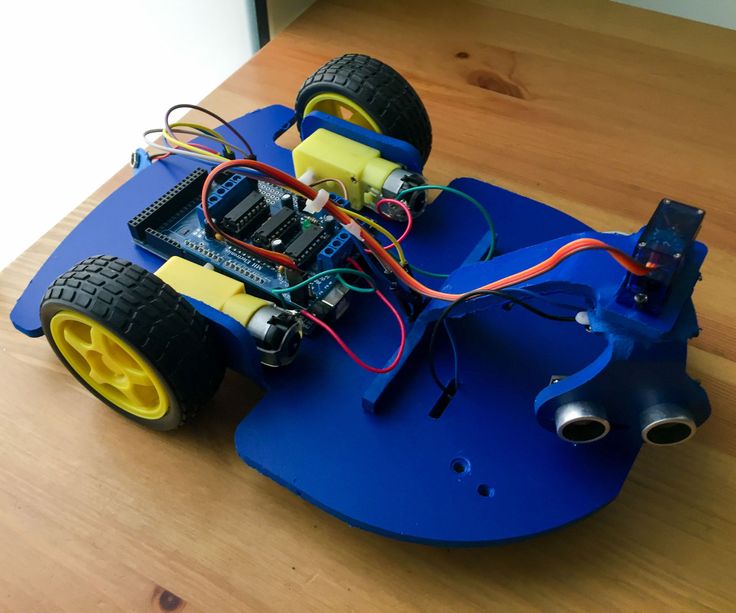
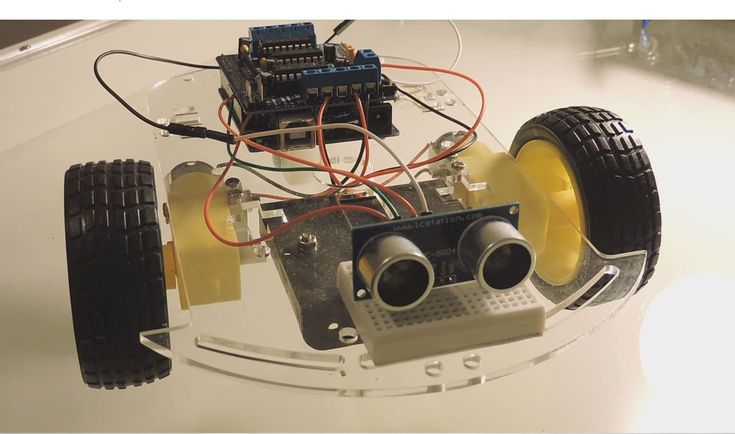
Хотя описание этой машины-робота на AliExpress написано на русском языке, она по-прежнему получает хорошие отзывы за то, что это забавный, простой в работе и универсальный маленький робот. В комплект входит шасси автомобиля, гидроакустический датчик для предотвращения столкновений, пульт дистанционного управления для управления автомобилем и плата Arduino, что делает его очень полезным для начинающих программировать микроконтроллеры.
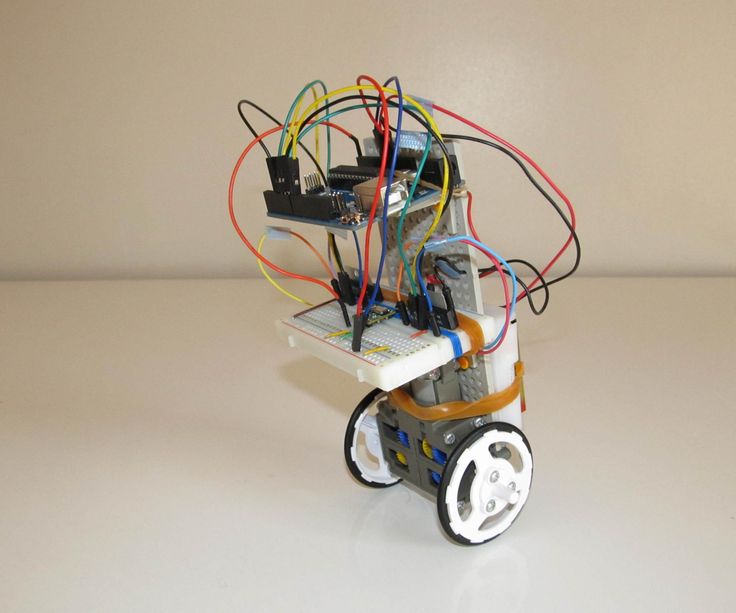
ArdBot (19 долларов США + Arduino)
ArdBot — это базовый передвижной робот, который можно быстро собрать и запустить, а его шасси можно расширять, так что у вас будет платформа, на которой вы сможете строить и изучать гораздо больше. Оригинальный ArdBot был подробно описан в журнале Servo , но вы можете найти все необходимое в этой статье от Robotoid. Он также включает в себя все номера деталей компонентов, которые вам понадобятся, чтобы привести в движение вашего первого робота.
Оригинальный ArdBot был подробно описан в журнале Servo , но вы можете найти все необходимое в этой статье от Robotoid. Он также включает в себя все номера деталей компонентов, которые вам понадобятся, чтобы привести в движение вашего первого робота.
Робот, избегающий препятствий, oddWires ($80) [Больше не доступен]
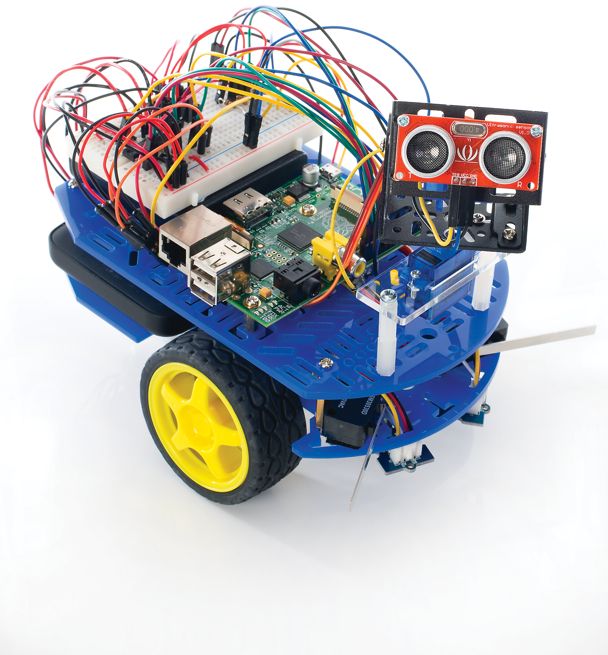
Этот комплект поставляется с Arduino и моторным шилдом, поэтому вы можете начать работу с этим простым двухколесным роботом, а затем перейти к более сложным и сложным проектам. Ультразвуковой модуль измерения расстояния предотвратит наезд робота на что-либо, а шасси позволяет легко устанавливать другие датчики и исполнительные механизмы. Компания OddWires разработала этот комплект с минимальным количеством пайки и соединений, поэтому он отлично подходит для начинающих. (А если у вас уже есть Arduino, вы можете получить такой же комплект с защитой двигателя, но без микроконтроллера, за 54 доллара.)
Один из самых дорогих вариантов базового комплекта роботов, четырехколесный Cherokey обладает некоторыми очень интересными функциями, которые вы не найдете в других роботах Arduino для начинающих — в первую очередь тот факт, что вы можете управлять этим маленьким роботом.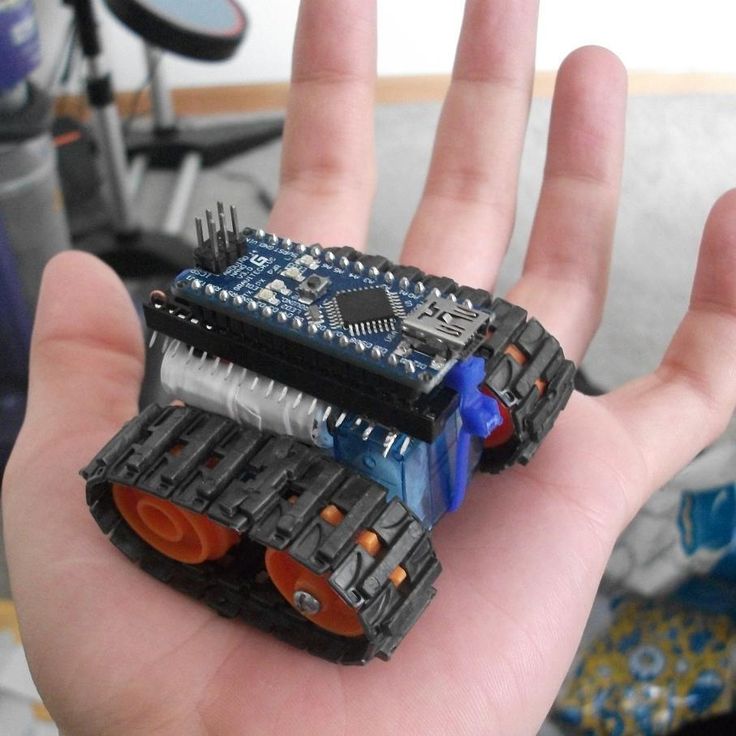 с вашего iPhone. Просто скачайте приложение GoBLE, и вы должны быть готовы к работе. С технической точки зрения, мозг этого Cherokey исходит от платы разработки Romeo, но он совместим с Arduino, так что вы не заметите разницы. В комплект входит ультразвуковой датчик и монтажный кронштейн, но вы можете добавить дополнительные датчики или даже роботизированную руку.
с вашего iPhone. Просто скачайте приложение GoBLE, и вы должны быть готовы к работе. С технической точки зрения, мозг этого Cherokey исходит от платы разработки Romeo, но он совместим с Arduino, так что вы не заметите разницы. В комплект входит ультразвуковой датчик и монтажный кронштейн, но вы можете добавить дополнительные датчики или даже роботизированную руку.
Если вам не нравится идея использовать набор для сборки чего-либо, есть робот, который отлично подойдет для вашего истинного духа самоделки: познакомьтесь с Джеймсом. Этот урок от Instructables покажет вам, как взять набор деталей, которые вы можете взять из стартового набора Arduino или купить по отдельности, и поместить их на раму, которую вы вырезали сами. Вам понадобится ленточная пила или другой электроинструмент, чтобы разрезать акрил, но если вы готовы это сделать, у вас не должно возникнуть проблем с остальными инструкциями.
Робототехника на ладони
В связи с растущим интересом к робототехнике появилось множество отличных вариантов для создания маленьких роботов на базе Arduino. И как только вы его создадите, вы сможете расширить его за счет дополнительных датчиков, сервоприводов, устройств или более сложного кода. Возможности безграничны.
И как только вы его создадите, вы сможете расширить его за счет дополнительных датчиков, сервоприводов, устройств или более сложного кода. Возможности безграничны.
Вы построили робота Arduino? Ваше мнение? Не могли бы вы порекомендовать набор, который вы использовали? Поделитесь своим опытом ниже!
Сборка робота Arduino, часть I: аппаратные компоненты
Я занимаюсь программным обеспечением почти столько же, сколько у меня есть память. Я также слежу за движением аппаратного обеспечения с открытым исходным кодом с момента его зарождения несколько лет назад, но у меня никогда не было времени или желания заняться аппаратным проектом самостоятельно.
До сих пор, то есть.
Я решил сделать небольшой аппаратный проект, чтобы намочить ноги, проект, который я полностью задокументирую и обсужу здесь в надежде вдохновить и мотивировать других сделать то же самое.
Вот список статей, которые я опубликовал:
- Часть I: Аппаратные компоненты (эта статья)
- Часть II: Программирование Arduino
- Часть III: Сборка робота
- Часть IV: (не очень) базовая прошивка робота
- Часть V: Обход препятствий
- Часть VI: Дистанционное управление
Принятие решения о сборке
В качестве аппаратной платформы я выбрал Arduino. Это был простой выбор, так как это платформа, которая широко используется специалистами по аппаратному обеспечению во всем мире, а это означает, что доступно много информации и ресурсов.
Это был простой выбор, так как это платформа, которая широко используется специалистами по аппаратному обеспечению во всем мире, а это означает, что доступно много информации и ресурсов.
Выбор проекта, соответствующего моим (ограниченным) знаниям, тоже был довольно прост. Я знал, что хочу создать крутую игрушку, чем смогу удивить своих детей. Это в значительной степени сократило список вариантов до одного: робота.
Но что за робот? Робота-гуманоида было бы здорово построить, но он не кажется хорошим выбором для первого проекта. Мне нужно было что-то достаточно простое, что я мог бы выполнить за относительно короткое время, но достаточно сложное, чтобы быть интересным и сложным.
После некоторого поиска в Google, чтобы узнать, что другие люди делают с Arduinos, я остановился на дистанционно управляемом роботизированном транспортном средстве.
Как я уже говорил, я хотел усложнить задачу, поэтому решил не покупать комплект, включающий все детали, программное обеспечение и инструкции.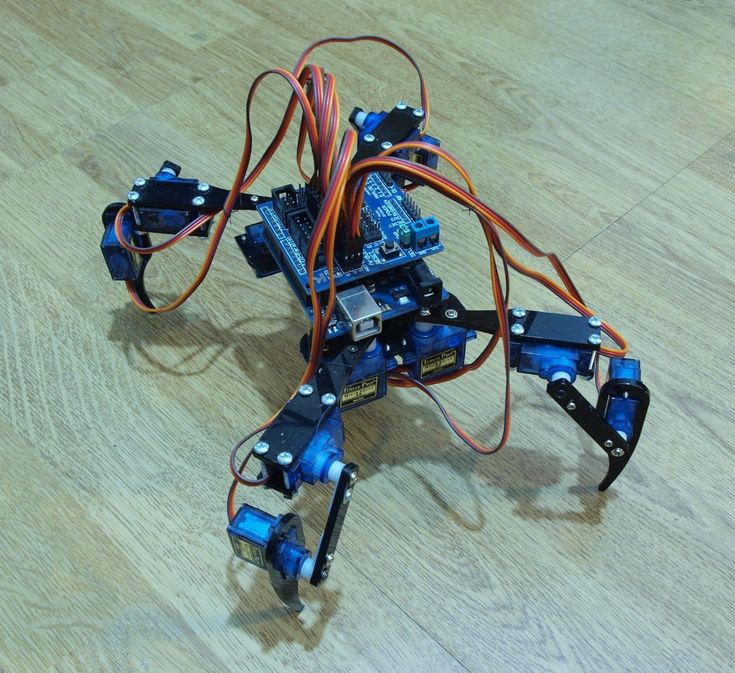 Вместо этого я решил придумать относительно нестандартную конструкцию робота, получить необходимые мне детали и выяснить, как его собрать и запрограммировать без каких-либо конкретных инструкций.
Вместо этого я решил придумать относительно нестандартную конструкцию робота, получить необходимые мне детали и выяснить, как его собрать и запрограммировать без каких-либо конкретных инструкций.
Вот функции, которые я решил, что мой робот будет иметь:
- Это должно быть транспортное средство, которое может двигаться вперед, назад и поворачивать.
- Он должен легко собираться и разбираться.
- У него должен быть режим, в котором он может двигаться самостоятельно, обнаруживая препятствия впереди и избегая их.
- У него должен быть режим, в котором им можно будет полностью управлять с моего Android-смартфона.
- Должно быть легко взломать, изменить и улучшить.
Вам это кажется достаточно интересным? Я надеюсь, что это так, это определенно делает для меня!
Список покупок
Имея в руках вышеприведенный список функций, я начал исследовать, какие детали мне нужны для моего проекта. Вот список, который я придумал:
- Плата Arduino
- Контроллер двигателя
- Датчик расстояния
- Ведомое устройство Bluetooth
- Макетная плата и кабели
- USB-кабель
- Транспортный комплект
Плата Arduino
Плата Arduino будет мозгом робота, поскольку на ней будет работать программное обеспечение, которое будет управлять всеми остальными частями.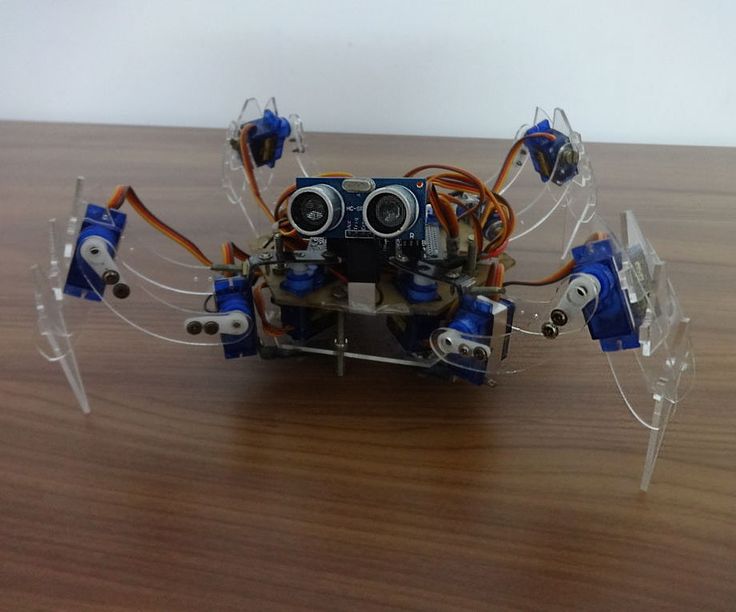
У моего сына был старый Arduino Uno, который он в итоге не использовал, поэтому мне не нужно было его покупать. Существует множество моделей Arduino или даже плат, совместимых с Arduino, которые можно использовать.
Моя рекомендация: Arduino Uno R3, в настоящее время $ 21,95 на Amazon.
Драйвер двигателя
Плата Arduino не может напрямую управлять двигателем. Сложность заключается в том, чтобы заставить двигатель выборочно вращаться вперед или назад, что требует переключения питания и заземления на двигатель.
Существует специализированная схема, называемая H-Bridge, которая может это сделать, и есть несколько реализаций этой схемы, легко доступных для платформы Arduino, или вы также можете собрать ее из базовых частей практически бесплатно.
Не имея особых знаний об этом, я купил самую дешевую плату контроллера двигателя, которую я нашел, полностью собранную версию моторного шилда Adafruit на Amazon за 13,99 долларов. Позже я понял, что с этой доской мне нужно будет решить проблему с дизайном, поэтому, если бы мне пришлось покупать снова, я бы взял более дорогую. Подробнее об этом позже.
Позже я понял, что с этой доской мне нужно будет решить проблему с дизайном, поэтому, если бы мне пришлось покупать снова, я бы взял более дорогую. Подробнее об этом позже.
Моя рекомендация: Arduino Motor Shield R3 за 33,01 доллара на Amazon.
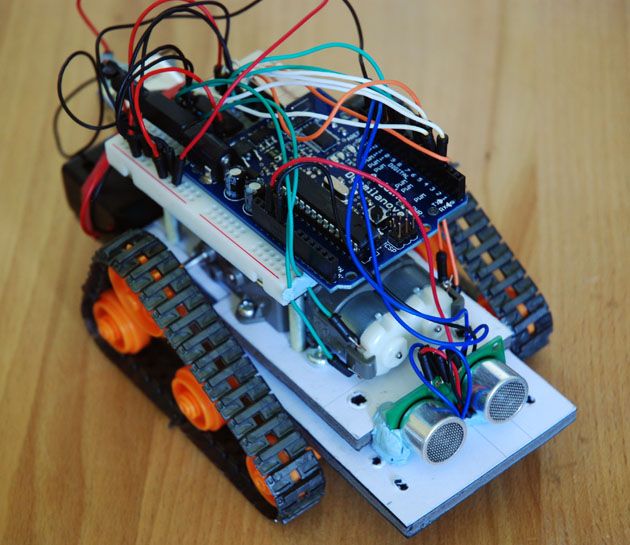
Датчик расстояния
Датчики расстояния отправляют ультразвуковой сигнал вперед, а затем ждут отраженного сигнала. В зависимости от того, сколько времени требуется сигналу для отражения, можно рассчитать приблизительное расстояние до препятствия. Я буду использовать это маленькое устройство, чтобы предотвратить столкновение робота со стенами или другими препятствиями на его пути.
Просматривая сайт Amazon, я нашел дешевый и высоко оцененный компонент HC-SR04, который в настоящее время продается за 6,59 долларов США.. Это хороший компонент, который не только даст роботу возможность видеть, но и придаст ему классные глаза!
Моя рекомендация: HC-SR04 за 6,59 долларов на Amazon.
Bluetooth Slave
Самый простой способ управлять роботом со смартфона — через последовательный интерфейс Bluetooth, который есть во всех современных смартфонах. Телефон будет выступать в роли ведущего, поэтому мне понадобился bluetooth slave для робота.
Просматривая сайт Amazon, я нашел BT2S Bluetooth to Serial Slave, который, кажется, хорошо отвечает всем требованиям.
Моя рекомендация: BT2S Bluetooth to Serial Slave за 14,95 долларов на Amazon.
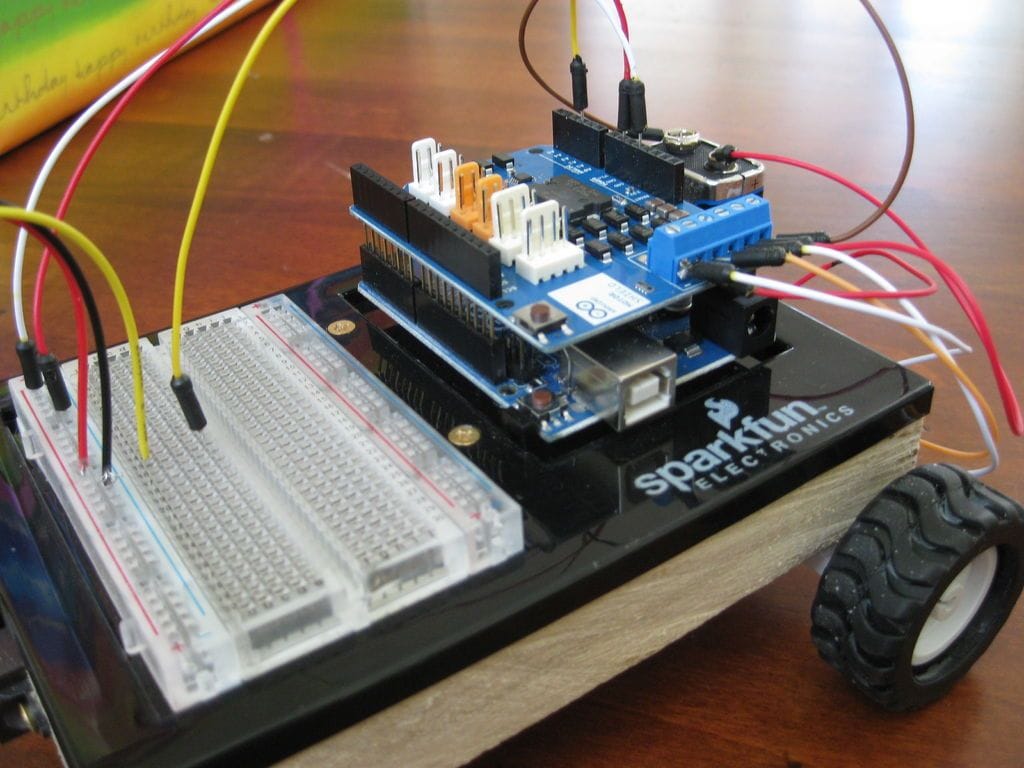
Плата для прототипирования и кабели
Одним из ограничений, которые я решил наложить на себя в этом проекте, является то, что я не буду заниматься пайкой, чтобы я мог собирать и разбирать робота в свое удовольствие, не разрушая любые части.
Затем мне понадобилась платформа, на которой можно было бы легко соединить все компоненты вместе. Для такого рода задач люди обычно используют макетную плату. Просматривая Amazon, я нашел один от microtivity, который поставляется с набором соединительных кабелей.
Моя рекомендация: microtivity IB401 за 8,66 доллара на Amazon.
Кабель USB
Плата Arduino подключается к компьютеру через порт USB. USB-соединение используется для загрузки программного обеспечения, а также может использоваться в качестве источника питания при тестировании.
Я взял кабель от старого принтера, который у меня есть, поэтому мне не нужно было покупать этот товар. Если вам нужно купить кабель, убедитесь, что у вас есть правильные разъемы. Со стороны компьютера используется стандартный разъем A-Male, а со стороны Arduino вам нужен разъем B-Male.
Моя рекомендация: кабель Amazon Basics USB 2.0 A-Male to B-Male, 6 футов за 5,49 доллара на Amazon.
Транспортный комплект
Существует множество вариантов транспортных средств, совместимых с роботами. Моим единственным требованием было то, чтобы у него была большая платформа, на которой можно было бы установить все детали, и чтобы он поставлялся с колесами и моторами.
